Download
1 / 28
280 likes | 422 Views
Autonomous Registration of LiDAR Data to Single Aerial Image. Nicholas S. Shorter nshorter@mail.ucf.edu. Takis Kasparis kasparis@ucf.edu. Research Website: http://www.nshorter.com. University of Central Florida Orlando, Florida, 32816 USA. Objectives – Project Overall Scope.

E N D
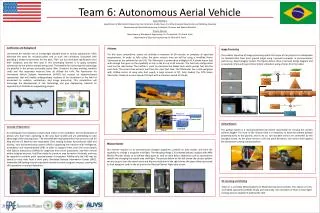
Autonomous Registration of LiDAR Data to Single Aerial Image Nicholas S. Shorter nshorter@mail.ucf.edu Takis Kasparis kasparis@ucf.edu Research Website: http://www.nshorter.com University of Central Florida Orlando, Florida, 32816 USA http://www.nshorter.com
Objectives – Project Overall Scope • 3D Reconstruction from Aerial Imagery and LiDAR data • Solely Concentrating on Buildings • Not reconstructing Trees, Cars, Power Lines, Roads, etc. • Automate process as much as possible (minimal to no user intervention) • End result to appear as 3D Models with images mapped to the models http://www.nshorter.com
LIDAR Overview • Data Collection • Plane Equipped with GPS, INS & LIDAR • LIDAR – Light Detection and Ranging (active sensor) • LiDAR sensor works day or night, cloud coverage or not • Collection of 3D points • Laser sent out from Emitter, reflects off of Terrain, Returns to Receiver • Receiver measures back scattered electromagnetic radiation (laser intensity) • Time Difference Determines Range to Target http://www.toposys.com/ http://www.nshorter.com
Sampling the following scene… http://www.nshorter.com
Raw Elevation Plot http://www.nshorter.com
Angled, Zoomed In View http://www.nshorter.com
Triangulated, Angled, Zoomed In View http://www.nshorter.com
Military Applications Automatic Target Recognition Commercial Change Detection (Natural Disasters) Network Planning for Mobile Communication Noise Nuisance Urban Planning Applications for 3D Reconstruction http://www.nshorter.com
Objectives – Conference Focus • Using TIN to upsample LiDAR data • Using Psuedo Binning approach to relate interpolated LiDAR (range image) to irregular data points as well as to TIN • Unsupervised registration of LiDAR data to aerial imagery http://www.nshorter.com
Registration Block Diagram http://www.nshorter.com
LiDAR Building Detection Method • Hierarchical Triangulated Connected Set Method • Unsupervised Building Detection from LiDAR TIN • No parameter adjustment • Capable of either Labeling Building/Non Building and/or Individual Buildings • Presented at previous conference • The Third International Symposium on Communications, Control and Signal Processing (ISCCSP 2008) http://www.nshorter.com
Psuedo Binning TIN Up-sampling • Extension of Cho et. Al.’s approach to TINs • Conceptually overlay grid on top of LiDAR • Track Triangles and Raw Points belonging to Interpolated Grid Cells • Interpolate Elevation from TIN for Rasterized LiDAR Points • Proposed computationally efficient technique for up-sampling http://www.nshorter.com
Overlaying Grid • Dark Dots – Irregular LiDAR Points • Light Dots – Grid Cell Center (interpolated LiDAR point) • Dotted line – Triangle Edge • Solid line – Grid Cell Border http://www.nshorter.com
Definitions for Up-Sampling Procedure • M = Number of rows in upsampled image • N = Number of columns in upsampled image • P = NxM (number of desired grid cell centers) • [Lx(k), Ly(k), Lz(k)] = LiDAR Point (3D) • [Gx(n,m), Gy(n,m), Gz(n,m)] = Interpolated Point • d(k) = distance between Grid Cell G(0,0) and k’th LiDAR point • Tn,m = triangle which encompasses grid cell center G(n,m) http://www.nshorter.com
Up-Sampling Procedure http://www.nshorter.com
Up-Sampling Procedure • Find Point Closest to G(0,0) • Check Triangles which use L(k) as vertex to see if they encompass G(0,0) • Then check triangles adjacent to those • Triangle encompassing G(0,0) dubbed T0,0 • Check to see if T0,0 encompasses G(0,1) • Check to see if triangles adjacent to T0,0 encompass G(0,1) • Triangle encompassing G(0,1) dubbed T0,1 • Check to see if T0,1 encompasses G(0,2) http://www.nshorter.com
LiDAR Range Image http://www.nshorter.com
Registration • Impossible to develop registration algorithm for all scenarios, must limit scope • Our Application (limiting scope) • Registered images come from two different sources • LiDAR Data from LiDAR Sensor up-sampled to Range Image from Proposed Psuedo Binning Approach • Aerial Image Captured from Camera on Plane • Registered images assume to only differ via Translation, Rotation, and Scaling http://www.nshorter.com
POMF Registration Algorithm • Unsupervised Area Based Registration Algorithm • Algorithm operates on image intensity instead of control pts • Because Range Image and Aerial Image of different intensity, preprocessing mandatory • Algorithm capable of automatically registering images differing via following transformations: • Scaling from 50 to 200% • Rotation • Translation (images must significantly overlap) http://www.nshorter.com
POMF Preprocessing • Scaling • Aerial Image – 15cm pixel spacing • LiDAR Data – 1 pt/1.3m2 • LiDAR data differs in scaling by factor of 10 • LiDAR is therefore upsampled and rasterized to range image to approximately same pixel spacing as aerial image • Binary Images • Brighter color = building • Darker color = non-building • Two binary images produced • One for LiDAR • One for Aerial Image http://www.nshorter.com
Aerial Binary Image http://www.nshorter.com
LiDAR Binary Image http://www.nshorter.com
POMF Registration • Algorithm takes Log Polar Transform of 2D Discrete Fourier Transform of Both Binary Images • Correlation of phases produces peak at location of rotation and scaling between images • Algorithm also takes 2D Discrete Fourier Transforms of Both Binary Images • Correlation of phases produces peak at location corresponding to translations between images http://www.nshorter.com
Registration • POMF Registration extracts geometric transformation parameters for translation, rotation, scaling • Building regions in range image are then translated, rotated, and scaled and thus aligned on top of aerial image http://www.nshorter.com
Aerial Image / LiDAR Image http://www.nshorter.com
Registered Range to Aerial Image http://www.nshorter.com
Future Work • Currently working on automatically extracting buildings from aerial image • Additional testing on more data sets • Improved building detection making use of features from both Aerial and LiDAR http://www.nshorter.com
Acknowledgements • Funding From Harris Cooperation • Fairfield Data Set from Dr. Simone Clode, Dr. Franz Rottensteiner, AAMHatch http://www.nshorter.com