Download
1 / 17
170 likes | 258 Views
Practical Exercise Autonomous Aerial Search Vehicle (AASV). Autonomous Aerial Search Vehicle (AASV).

E N D
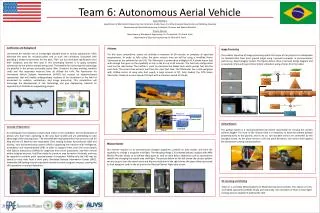
Autonomous Aerial Search Vehicle (AASV) • Autonomous Aerial Search Vehicle (AASV) is in short term a model airplane with a programmable controller onboard; programmed to control and steer the airplane based on information received by a GPS. AASV also have a ground based part which send and receive information to and from the airplane, and also have the opportunity to override the programmed controller onboard the airplane and take control. • The AASV will be restricted to a flying platform capable of flying according to a predefined route. Take off and landing will be done manually, autonomous flight will only commence when the aircraft is at a predefined minimum altitude and manual flight must be resumed before landing. • The Autonomous Aerial Search Vehicle (AASV) can be divided, in the airborne systems part and the ground based systems part.
Autonomous Aerial Search Vehicle (AASV) • Both the onboard Eyebot controller and the ground based laptop shall be able to autonomously fly the aircraft according to a predefined route using the input from the GPS. • When the onboard controller is controlling the aircraft both GPS data and control signals shall be reported to the ground based system who presents this information on screen as well as logging it. • Whether the airborne system or the ground based system is controlling, the aircraft shall be controllable through the laptop interface. • It shall also be possible to control the aircraft using a control stick connected to the laptop’s RS-232 port. In case of manual control the signals from the control stick shall be collected by software on the laptop, processed and sent to the Eyebot controller through the GSM connection. The Eyebot process these data and move servos accordingly. • It shall be possible, using the control stick, to select between autonomous and manual flight. • Since navigation in the air can be dangerous, as it can crash, the AASV must be robust with regard to both software and hardware failures. It must be able to handle failures and be able to operate in another state (both autonomous and manual).
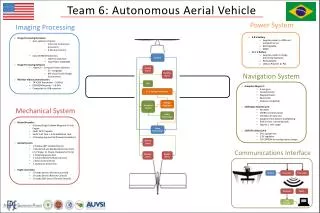
Autonomous Aerial Search Vehicle (AASV) • We will mainly look at the airborne system. The airborne system consists of the following technical equipment (excluding the airplane itself): • Eyebot Robot controller • GPS • GSM modem • Servos to move control surfaces and throttle • 7.2 volt battery to power Eyebot • 6.0 volt battery to power servos • 12.0 volt battery to power GPS and GSM • Various cables and switches
Airborne system The following functions are central to the purpose and operation of the airborne system: • The system shall be able to autonomously fly the aircraft according to a predefined route using the input from the GPS. • The system shall be able to send GPS data and control signals to the ground based system when the onboard controller is controlling the aircraft, using a GSM transmitter. • The system shall be able to receive control signals from the laptop through the GSM connection. • The system shall be able to process the control signals from the laptop through the GSM connection and move servos accordingly. • This system is also going to make sure that nothing critical will happened.
Airborne system Stakeholders: • The client. • The software developers of the AASV. • Future users of the AASV.
Components GSM modem: • This GSM modem is communicating with the surrounding GSM network, and is used to establish communication with the ground while the plane is flying. This part is interacting with the Eyebot using RS-232 (serial) communication. The GSM modem is essential when it comes to sending and receiving data to and from the ground based system. • All communication between the airborne system and the ground based system will go through the GSM modem GPS: • The GPS will register where the plane is in a three dimensional form (longitude, latitude and altitude). The GPS will also register the airplanes speed and course (North, East, West, South). • Latitude (breddegrad) • Longitude (lengdegrad) • Altitude (høyde)
Components RS-232 • The communication between the Eyebot and GPS and between the Eyebot and GSM-modem is based on the RS-232 serial interface communication. Servos • Based on Eyebot output the servos change its position, which makes the airplane turn, change height and speed. Eyebot: • This is the computer (CPU) in the airplane system. This part has the responsibility of controlling everything that is happening in the plane. It controls the incoming data from the GPS, the outgoing and incoming data from the GSM and finally it runs the servos that control the airplane (rudder, elevator and throttle). This component also has a microphone attached to it. This can be used to monitor different sound.
Components Servo switcher • A switch which decides if it is the servo positions from the RC receiver or the Eyebot that will be chosen. The switch is controlled by the RC receiver, which is controlled by the main controller.. RC Receiver • Receive servo signals and control signal from the main controller on ground.
FMEA • FMEA selects the individual components or functions within a system and investigates their possible modes of failure. • It then considers possible causes for each failure mode and assesses their likely consequences. • The effects of the failure are determined for the unit itself and for the complete system, and possible remedial actions are suggested. • For hver komponent/funksjon identifiseres altså: • alle mulige feilmåter (feilmodier), • mulige årsaker til hver feilmåte, • mulige konsekvenser, både lokalt og for systemet som helhet, av hver feilmåte, • mulige risikoreduserende aksjoner.