Download
1 / 76
800 likes | 1.08k Views
We know that a net force applied to a body gives that body an acceleration. But what does it take to give a body an angular acceleration?

E N D
We know that a net force applied to a body gives that body an acceleration. But what does it take to give a body an angular acceleration? • The physical quantity that make things turn is called torque. The net torque acting on a rigid body determines its angular acceleration, in the same way that the net force on a body determines its linear acceleration.
Ch 10 – learning goals • What is meant by the torque produced by a force. • How the net torque on a body affects the rotational motion of the body. • How to analyze the motion of a body that both rotates and moves as a whole through space. • How to solve problems that involve work and power for rotating bodies. • What is meant by the angular momentum of a particle or of a rigid body. • How does the angular momentum of a system changes with time.
The quantitative measure of the tendency of a force to change a body’s rotational motion is called torque; Fa applies a torque about point O to the wrench. Fb applies a greater torque about O, and Fc applies zero torque about O.
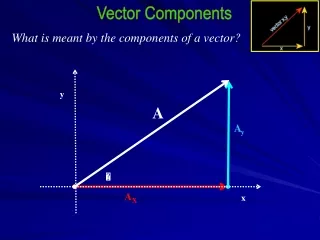
The tendency of a force F to cause a rotation about O depends on • its magnitude F • the perpendicular distancel1 between point O and the line of action of the force. We call the distance l1 the lever arm of force F1about O. • We define the torque of the force F1 with respect to O as the product F1l1. we use the Greek letterτ (tau) for torque. τ = Fl F: force l: the perpendicular distancel1 between point O and the line of action of the force
The direction of torque • counterclockwise torques are positive and clockwise torques are negative.
The units of torque • The SI unit of torque is the Newton-meter. • Torque is not work or energy, and torque should be expressed in Newton-meters, notjoules.
If φ is angle between force F and distance r τ = F∙(r∙sin) r∙sin - perpendicular distance τ = r∙(F∙sin) F∙sin - perpendicular force
Magnitude: When a force F acts at a point having a position vector r with respect to an origin O, the torque of the force with respect to O is the vector quantity The direction of torque is perpendicular to both r and F. The torque vector is directed along the axisof rotation, with a sense given by the right-hand rule.
A dot ● means pointing out of the screen A cross × means pointing into the screen
45o 60o sign sign example • Rank the design scenarios (A through C) on the basis of the tension in the supporting cable from largest to smallest. In scenarios A, and C, the cable is attached halfway between the midpoint and end of the pole. In B, the cable is attached to the end of the pole. 30o sign A B C A, C, B
example • If Anya decides to make the star twice as massive, and not change the length of any crossbar or the location of any object, what does she have to do with the mass of the smiley face to keep the mobile in perfect balance? Note that she may have to change masses of other objects to keep the entire structure balanced. • make it eight times more massive • make it four times more massive • make it twice as massive • Nothing • impossible to tell
since • Newton’s second law for the tangential component is:
We write an equation like this for every particle in the body and then add all these equations: Just as Newton’s second law says that the net force on a particle equals the particle’s mass times its acceleration, the equation says that the net torque on a rigid body equals the body’s moment of inertia about the rotation axis times its angular acceleration.
4 things to note in Eq. • The equation is valid only for rigid bodies. • Since we used atan = r∙αz, αz must be measured in rad/s2. • Since all the internal torques add to zero, so the sum ∑τ in Eq. ∑τ = Iα includes only the torques of the external forces. • Often, an important external force acting on body is its weight. We assume that all the weight is concentrated at the center of mass of the body to get the correct torque (about any specified axis).
Consider the situation on the diagram, find the acceleration of the block of mass m.
The figure shows a glider of mass m1 that can slide without friction on horizontal air tract. It is attached to an object of mass m2 by a massless string. The pulley has radius R and moment of inertia I about it axis of rotation. When released, the hanging object accelerates downward, the glider accelerates to the right, and the string turns the pulley without slipping or stretching. Rank the magnitudes of the following forces that acting during the motion, in order from largest to smallest magnitude. • The tension force (magnitude T1) in the horizontal part of the string; • The tension force (magnitude T2) in the vertical part of the string; • The weight m2g of the hanging object.
example • Find the magnitude of the angular acceleration α of the swing bar.
When a rigid body rotate about a moving axis, the motion of the body is combined translation and rotation. We need to combine: • Translational motion of the center of mass • Rotation about an axis through the center of mass.
The kinetic energy of a rigid body that has both translational and rotational motions is the sum of a part ½ Mvcm2 associated with motion of the center of mass and a part ½ Icmω2 associated with rotation about an axis through the center of mass.
The point on the wheel that contacts the surface must be instantaneously at rest so that it does not slip. Hence the velocity v1’ of the point of contact relative to the center of mass must have the same magnitude but opposite direction as the center-of-mass velocity vcm. If the radius of the wheel is R and its angular speed about the center of mass is ω, then the magnitude of v1’ is R∙ω; hence we must have vcm = Rω (condition for rolling without slipping)
Note that the relationship vcm = Rω holds only if there is rolling without slipping. • When a drag racer first starts to move, the rear tires are spinning very fast even though the racer is hardly moving, so Rω is greater than vcm. • If a driver applies the brakes too heavily so that the car skids, the tires will spin hardly at all and Rω is less than vcm. • If a rigid body changes height as it moves, we must also consider gravitational potential energy. U = Mgycm
The speed doesn’t depend on either the mass M of the body or its radius R. All uniform solid cylinders have the same speed at the bottom, even if their masses and radii are different, because they have the same c. All solid spheres also have the same speed, an so on. • The smaller the value of c, the faster the body is moving at the bottom (and at any point on the way down). • Small-c bodies always beat large-c bodies because they have less of their kinetic energy tied up in rotation and have more available for translation. • Reading the values of c from the reference sheet, the order of finish is as follows: • Solid sphere • Solid cylinder, • Thin-walled hollow sphere • Thin-walled hollow cylinder
When a rigid body with total mass M moves, its motion can be described by combining translational motion and rotational motion In translation, the acceleration acm of the center of mass is the same as that of a point mass M acted on by all the external forces on the actual body: The rotational motion about the center of mass is described by the rotational analog of Newton’s 2nd law: • Note: when we learned this equation, we assumed that the axis of rotation was stationary. But in fact, this equation is valid even when the axis of rotation moves, provided the following two conditions are met: • The axis through the center of mass must be an axis of symmetry. • The axis must not change direction.
The axle of a bicycle wheel passes through the wheel’s center of mass and axis of symmetry. Hence the rotation of the wheel is described by ∑τz = Icmαz provided the bicycle doesn’t turn or tilt to one side (which would change the orientation of the axle).
When a perfectly rigid sphere is rolling down a perfectly rigid incline, there is no sliding at the point of contact, so friction does no work. However, in reality, when a not so perfectly rigid sphere rolling down a not so perfectly rigid incline, there are some deformations at the points of contact. As a result, there is rolling friction. Often the rolling body and the surface are rigid enough that rolling friction can be ignored.
Suppose the solid cylinder used as a yo-yo in example 10.6 is replaced by a hollow cylinder of the same mass and radius • Will the acceleration of the yo-yo • Increase • Decrease, • Remain the same? • Will the string tension • Increase, • Decrease, • Remain the same?
example • Two uniform identical solid spherical balls each of mass M, radius r and moment of inertial about its center 2/5MR2, are released from rest from the same height h above the horizontal ground Ball A falls straight down, while ball B rolls down the distance x along the inclined plane without slipping. • If the velocity of ball A as it hits the ground is VA, what is the velocity VB of ball b as it reaches the ground? • In terms of acceleration due to earth’s gravity g, the acceleration of ball B along the inclined plane would be
The work dW done by the force Ftan while a point on the rim moves a distance ds is dW = Ftan∙ds. If dθ is measured in radians, then ds = R∙dθ
The total work W done by the torque during an angular displacement from θ1 to θ2 is • If the torque remains constant while the angle changes by a finite amount ∆θ = θ1 – θ2
The work done by a constant torque is the product of torque and the angular displacement. If torque is expressed in Newton-meters and angular displacement in radian, the work is in joules. Only the tangent component of force does work, other components do no work.
When a torque does work on a rotating rigid body, the kinetic energy changes by an amount equal to the work done. Wtot = ½ I∙ω22 – ½ I∙ω12
Power is the rate of doing work. P = dW/dt = τz(dθ/dt) = τzω When a torque acts on a body the rotates with angular velocity ωz, its power is the product of τz and ωz. This is the analog of the relationship P = F∙v
You apply equal torques to two different cylinders, one of which has a moment of inertial twice as large as the other cylinder. Each cylinder is initially at rest after one complete rotation, which cylinder has the greater kinetic energy? • The cylinder with the larger moment of inertia; • The cylinder with the smaller moment of inertia; • Both cylinders have the same kinetic energy.
∑F = ma K = ½ mv2 Wtot = ½ mv22 - ½ mv12 P = Fv • Every rotational quantity that we have encountered so far is the analog of some quantity in the translational motion of a particle.
The analog of momentum of a particle is angular momentum, a vector quantity denoted as L. L = I ∙ ω The value of L depends on the choice of origin O, since it involves the particle’s position vector relative to O. the units of angular momentum are kg∙m2/s.
If a particle moves in the xy-plane counterclockwise, then the angular momentum vector L is perpendicular to the xy-plane. The right-handrule for vector products shows that is direction is along the +z-axis. If at moment t the position of the particle is r and its linear momentum is p = m∙v, then the magnitude of angular momentum is: L = (mvsinΦ)r or L = mv(rsinΦ) = mvl Where l is the perpendicular distance from the line of v to O. this distance plays the role of “lever arm” for the momentum vector.
= Fnet • When a net force F acts on a particle, its velocity and momentum changes: • The rate of change dp/dt of the linear momentum of a particle equals the net force acting on it. • Similarly, when the torque of the net force acting on a particle, its angular velocity and angular momentum changes: • The rate of change of angular momentum of a particle equals the torque of the net force acting on it.
The derivation of If we take the time derivative of , using the rule for the derivative of a product:
Consider a rigid body rotating about the z-axis with angular speed ω. First let’s think about a thin slice of the body lying in the xy-plane. Each particle moves in a circle centered at the origin, and at each instant its velocity vi is perpendicular to its position vector ri. Hence Φ = 90o for every particle. A particle with mass mi at a distance ri from O has a speed vi = riω. The magnitude of its angular momentum is: Li = (mivisinΦ)ri = (miriω)ri = miri2ω The direction of each particle's angular momentum, as given by the right-hand rule for the vector product, is along the +z-axis.
We can do this same calculation for the other slides of the body, all parallel to the xy-plane. Since the rigid body is rotating the axis of symmetry, their angular momentum vector sum L1 + L2 also lies along the symmetry, and its magnitude is L = Iω. Since ω and L have the same direction, we have a vector relationship: L = Iω • The total angular momentum of the slice of the body lying in the xy-plane is the sum ∑Li of the angular momenta Li of the particles: Where I is the moment of inertia of the slice about the z-axis.