Download
1 / 10
100 likes | 278 Views
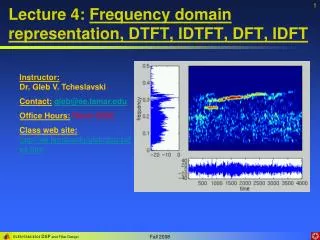
DFT, IDFT, RRC filter, timing synchronization, and carrier phase tracking. The DFT of a rectangular pulse. Consider a rectangular pulse: x[n]=1 for 0<=n <= m-1 and 0 at all other places What is the DFT of it? Its magnitude is called the sinc function.

E N D
DFT, IDFT, RRC filter, timing synchronization, and carrier phase tracking
The DFT of a rectangular pulse • Consider a rectangular pulse: • x[n]=1 for 0<=n <= m-1 and 0 at all other places • What is the DFT of it? • Its magnitude is called the sinc function. • It is 0 when mk is the multiples of N. When k=0, it is not zero.
The Inverse DFT • IDFT-- At time n, it’s basically the summation of all frequency components at this time. • The DFT uses negative exponent to take a sample at this frequency coz the product with this frequency will be 1.
The IDFT of a rectangular pulse in the frequency domain • It’s the same as the time domain!
Convolution and Frequency • Assume we have x[n], y[n], and z[n] is the convolution of x[n] and y[n]. • Assume N is large and the non-zero range of x[n] is [0,N_1-1].
Convolution and Frequency • The DFT of z[n] is exactly the DFT of x[n] and y[n].
Pulse shaping • Pulse-shaping – converting the bits into baseband waveforms. • The problem is the baseband waveform must be bandwidth-limited. Something that is bandwidth-limited must have an infinite length impulse response in the time domain. • So you have to take samples at the receiver side to determine the bits. • If using some arbitrary LPF, the signal shape is arbitrary and the samples you take for y[n] will have interferences from y[n-1], y[n-2], …, y[n+1], y[n+2]… • So you want to use LPF such that all other non-relevant samples have 0 influence on the current sample.
RRC filter • The Raised Cosine Filter satisfies this constraint. • Root means that the sender and receiver will each do half of it. • Check http://www.dsplog.com/2008/04/22/raised-cosine-filter-for-transmit-pulse-shaping/ • http://en.wikipedia.org/wiki/Raised-cosine_filter
Sample Time • You need to take samples at the right time. • Designed algorithms to figure out the right time to take the samples. • Basic idea: u=a_{k-1} x_k – a_{k} x_{k-1}. Use the pulse shape. • Decision based.
Carrier Phase Tracking • Use the current sample to figure out the difference. • Current phase error is the phase difference between the current sample with the decision (assuming the decision is correct).