Download
1 / 26
260 likes | 500 Views
APT 2.0. Simon Dawes & Keith Rickard Update 1. What is the APT?. A utomatic P hotometric T elescope Built by Jack Ells in 1984 (based on JBAA) A utomatic Once set-up it continues to observe the same stars over and over, corrects for tracking problems, recognises cloud. P hotometric

E N D
APT 2.0 Simon Dawes & Keith Rickard Update 1
What is the APT? Automatic Photometric Telescope Built by Jack Ells in 1984 (based on JBAA) Automatic Once set-up it continues to observe the same stars over and over, corrects for tracking problems, recognises cloud. Photometric Uses a photomultiplier tube and 24 bit counter (256^3 – 3 x 8 bit counters) to measure star brightness Telescope Duh…
Why 2.0 The APT has been out of commission for about 5 years • The fluid light guidewent opaque - a generous gift from the BAA enabled us to buy a new one. • The BBC Model B used to control the telescope stopped working - it was a rare 64kB version and the National Museum of Computing generously swapped it for a working model they had. • The drivesfailed, the 20 year old soldering failed and was rewired by an ESA engineer • The BBC Model B software keeps crashing • Moving Data off of the APT (if it was working) requires manual transcription
2.0 Approach Concepts • Computing Platform Agnostic • Interface platform well established and supported • Simple User Interface • Simple to use • Smaller footprint
2.0 Approach Why keep the PMT and not use a CCD camera? • A more complex solution is required (e.g. laptop and imaging software) • Additional cost • PMT provides instant results - a CCD requires post-processing time and effort • PMT can be accruate to a few 1000ths of a magnitude
Main Components of the APT • 8 1/2 inch Newtonian reflector • Flip mirror • Light Guide • Photomultiplier Tube (PMT) • Filter wheel • Amplifier/Discriminatior • PMT pulse Counter • Stepper motors and control box • Computer system
Flip mirror Flip mirror Reticle eyepiece Light guide socket A pin hole allows light of the star to pass through to the PMT. The field of view is 1 arc minute.
Mission Control Monitor BBC Micro B computer (64K RAM) Two 5 1/4" floppy disk drives PMT pulse counters Stepper motor control box 900v DC power supply PMT amplifier and discriminator box Photomultiplier tube (PMT)
Inside the control box Resistor heat sink 2 x Stepper motor control boards Sockets for stepper motor leads 240V AC to 30V DC transformer BBC Micro B cable connector socket note: wiring rebuilt by Mark
Photomultiplier tube 900V power supply Photomultiplier tube (PMT) enclosure Amplifier and discriminator box Filter wheel Light guide hole
Amplifier and Discriminator Connector for PMT cable +12v/-12v power socket Connector to PMT Pulse Counter box
PMT Pulse Counter Amplifier/Discriminator cable connector BBC interfacing chip Counters (count up to 16,777,216 pulses) Cable to BBC Micro B interface port 5 volt supply from BBC Micro B computer
Raspberry Pi • 256MB RAM (BBC has 64K!) • 600 Mhz (BBC runs at 2Mhz!) • Runs under Linux (like Windows but free and open source) • Operating system runs from an SD Card instead of a hard disk • 2 x USB ports (for mouse, keyboard and other devices!) • GPIO port • Runs off 5V at 700ma • Costs around £33 Also has • Ethernet port for connection to a network • HDMI & composite video output • Audio output
Arduino Uno • 32K Flash memory • 2K RAM • Runs at 16mhz • 20 input and output pins which can be used to directly control electronic devices • USB port which is presented to connecting device as a serial port • Runs off 5 - 12V, max 1000ma • Costs around £15
2.0 Architecture Controller RA Drive • The programming language for the Arduinos is C++ • Raspberry Pi will be the "brains" of the operation and will control the two Arduinos by instructing them what to do, operate the user interface, store data from the PMT, etc. The program is being written in Python. Arduino(Slave) DEC Drive counter PMT RPi(Master) Arduino (Slave) Keypad LCD Buzzer
Connecting to the stepper motor control boards The Arduino will be housed in the stepper boards box and connected to this board
Connecting to the PMT pulse counters This is the only bit that is required. These counter chips will be placed on a small circuit board known as a "shield" on the Arduino and housed in the stepper boards box
Hand Box Will contain a red lit 2x16 character LCD Will aim to have the keypad backlit in red
Software ~15% complete; 1235 lines of code -No user interface (no keyboard, mouse or monitor!) - Controlled by pre-built files and user input/output via a hand controller -Arduino's controlled by bespoke 'language' invented by Keith and Simon, currently 31 commands.
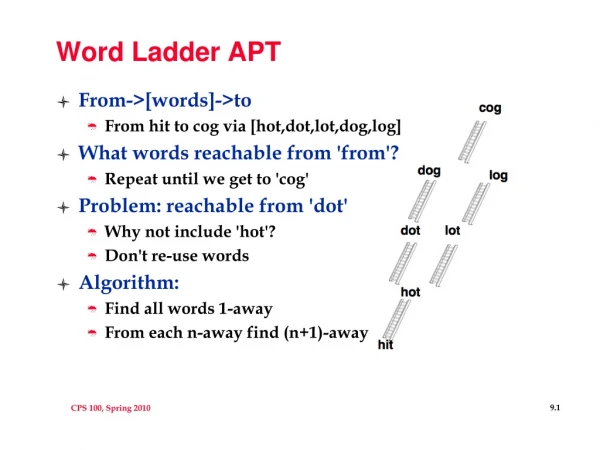
Spiral Search We are keeping many concepts in the original software such as the spiral search. This will be managed by the Python software
Current Menu Structure 1. APT 2.0 Menu Press * * # # * # 6 6 6 Select Variable Press *,2,4 or # Select Observer Press *,2,4 or # Commission Press *,2,4 or # About Press *,2,4 or # 4 4 4 * # cycle through objects in objectlist.csv Z Cam Press *,2,4 or # Find Variable HA 18.8:DEC 73.1 Find Comparison HA 18.8:DEC 73.1 During this sequence: 1)The arrow keys are available to slew the scope. 2)The A,B,C keys change the slew speed 3)* moves on in the sequence 4) # exits the sequence back to 'Select Variable' Find Check HA 18.8:DEC 73.1 Find Sky * = Done