Download
1 / 19
190 likes | 339 Views
The limiting behavior of the mixed push-pull manpower model. Session ‘Emerging Applications of OR: Stochastic Models in Manpower Planning’, 24th European Conference on Operational Research, EURO XXIV, Lisbon, July 2010. Tim De Feyter * and Marie-Anne Guerry

E N D
The limiting behavior of the mixed push-pull manpower model Session ‘Emerging Applications of OR: Stochastic Models in Manpower Planning’, 24th European Conference on Operational Research, EURO XXIV, Lisbon, July 2010. Tim De Feyter* and Marie-Anne Guerry *Center for Business Management Research, Hogeschool-UniversiteitBrussel, K.U.Leuven Association, Stormstraat 2, B-1000 Brussels, Belgium
Introduction • Manpower Planning is concerned with predicting and controlling the (internal) personnel structure of an organization. • A manpower system is classified into k exclusive subgroups, resulting in the states of the system S1,…,Sk. • To model the dynamics in the manpower system (transitions between the states), traditionally two approaches are used in Manpower Planning: • Push-models (based on Markov theory) • Pull-models (based on Renewal theory)
Introduction • Push-models • Every employee in a state i has the same probability wito leave the organization and the same probability pijto make a transition to state j. • A certain expectednumber of transitions in each time period • Pull-models • Every employee in a state i has the same probability wito leave the organization and the same conditional probability sji to make a transition to fill a vacancy in state j. • Transitionsonlyifthere are vacancies in otherstates Bartholomew D.J., Forbes A.F. and McClean S.I. (1991). Statistical techniques for manpower planning.Chichester: Wiley publishers.
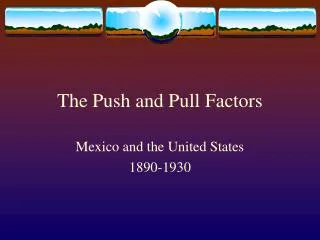
Introduction Push-model Pull-model R.r1 (1-s11-s12).V1 n1(t) n1(t).w1 n1(t) n1(t).w1 n1(t).p12 n2(t).p21 V2.s21 V1.s12 R.r2 n2(t) (1-s21-s22).V2 n2(t) n2(t).w2 n2(t).w2 The stocks at time t are denoted by the row vector n(t) = [n1(t) n2(t) … nk(t)] with k = number of states in the manpower system. In time-discrete models, the dynamics in the manpower system can be expressed as systems of difference equations.
Introduction Push-model Pull-model V(t)=[n*-n(t-1).(1-W)] n(t)=n*-V(t).S Notations k number of states in the system ni(t) number of staff in state i on time t n(t) (1 × k) row vector with entries ni(t) pij transition rate from state i to state j P (k × k) transition matrix with entries pij R total number of recruitments ri proportion of R(t) recruited in state i r (1 × k) recruitment vector with entries ri Notations k number of states in the system ni(t) number of staff in state i on time t n(t) (1 × k) row vector with entries ni(t) ni* desired number of staff in state i n* (1 × k) stock vector with entries ni* sij rate of vacancies state i filled from state j S (k × k) transition matrix with entries sij wi rate of vacancies state i filled from state j W (k × k) diagonal matrix with entries wi
Mixed push-pull model (De Feyter, 2007) In HRM-literature, the consensus has grown that firms seldom apply one unique personnel strategy, but mix several strategies to enable success on several separate markets. Consequently, a mix of push and pull transitions might occur in the same personnel systems at the same time. The mixed push-pull model allows studying the dynamics in a manpower systems if push as well as pull transitions occur. De Feyter T. (2007). Modeling mixed push and pull promotion flows in Manpower Planning, Annals of Operations Research, 155(1), 25-39.
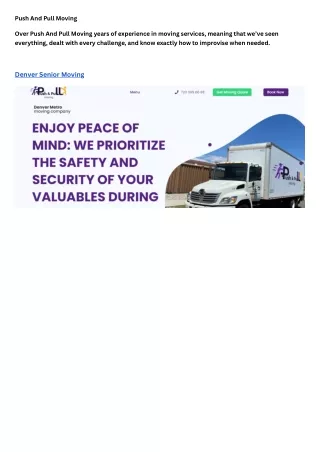
Mixed push-pull model (De Feyter, 2007) n1(t) (1-s11-s12).V1 n1(t).w1 R.r1 V2.s21 V1.s12 n1(t). (1-w1-V2.s21).q12 n2(t). (1-w2-V1.s12).q21 n2(t) n2(t).w2 (1-s21-s22).V2 R.r2
Mixed push-pull model (De Feyter, 2007) In the mixed push-pull approach, the dynamics in the system is modeled by the following set of difference equations: Q={qij} is a row stochastic matrix. Its elements represent the transition probabilities for employees in group i at time t to be in group j at time t+1, under the condition that they do not leave the system nor make a pull transition during time interval. _____ The Max-operator is hereby defined as .
Asymptotic behavior of the MPPM • MP research involves studying the limiting behavior of the expected number of employeesas • In the mixed push-pull model, this is a complex problem, since: • In each time interval [t,t+1) the transitions may be determined by both push and pull probabilities or only by push probabilities; • This system may be different for the different states.
Asymptoticbehavior of the MPPM Theorem (De Feyter, 2007) Let A = I–S.Q and M= [I-W][Q-A]. If in every time period both pull and push transitions occur in all the states, the row sums of M are strictly less than one and M is such that: (i) M is a power-nonnegative matrix(1) or (ii) M+I is a totally nonnegative matrix(2) then the mixed push-pull models converges to _____ A matrix A is called power-nonnegative of degree k (with k a positive integer) if and k is the smallest integer for which this condition holds. A matrix is called totally nonnegative if all his minors are nonnegative.
Asymptotic behavior of the MPPM However, these are not necessary conditions. We studied this further for k = 2 by reformulating the difference equations as: .
Asymptotic behavior of the MPPM Theorem In case the system is stable from a particular value of t on and for all values i, the evolution of the stock vector converges to: Theorem If the evolution according to M++ is convergent, than the same is true for the evolution according to M-+ , M+- and M--.
Asymptotic behavior of the MPPM Properties of matrix • Row sums are between 0 and 1 • The diagonal elements are between -1 and 1; the other elements between -1 and 1. • Therefore, we can show that the largest eigenvalue is positive and smaller than 1. • And the smallest eigenvalue is smaller than 1 (but can only smaller than -1 if Det M++ is positive and Trace M++ is negative)
Conclusion • We extended the results on the limiting behavior of the mixed push-pull model in previous work by relaxing the conditions for which we know that the stocks converge. • Further research is necessary to find out under which conditions the system becomes stable (so far, all the examples we know, the system converges or flips between ‘two converging stocks’)
Conclusion Therefore, the properties of the products of two different matrices should be investigated, since: • If the model keeps switching between the same two systems M1 and M2: • The model would become stable if from a particular value of t on and for all values i: stays positive or negative. To evaluate this, we need to investigate the evolution n(t) by relaxing the assumption of stable systems which are determined by only one fixed