Download
1 / 9
90 likes | 223 Views
Set Up of Agricultural Demonstrator. Lorenzo Fantesini – RE:Lab srl – l.fantesini@re-lab.it Massimiliano Pavesi – RE:Lab srl – m.pavesi@re-lab.it. Agricultural Demonstrator.

E N D
Set Up of Agricultural Demonstrator Lorenzo Fantesini – RE:Lab srl – l.fantesini@re-lab.it Massimiliano Pavesi – RE:Lab srl – m.pavesi@re-lab.it
Agricultural Demonstrator • A scaled replica of an agricultural loader will be used to set up the agricultural demonstrator (As stated during the last review meeting in Vienna) • This demonstrator will allow to show the MOGENTES framework at ICT2010 Exhibition (Brussels, 27-29 September 2010) and • at the MOGENTES final demonstration
Agricultural Scaled Replica • LEGO Technic 8265 Front Loader, motorized with Power Functions Motor Set 8293. • Technical data: • Dimensions: 58.2 x 37.8 x 8.7 cm • Weigth: 1.8 Kg • Available Movements: Arm and Bucket (raise, lower and tip) • 1 Linear actuator for the Bucket • 2 Linear actuators for the Arm (Considered as just one)
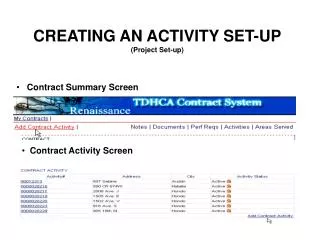
Demonstrator Architecture TFT Display • Linear Motors • ARM • BUCKET Implement ECU ISOBUS Joystick ISOBUS VT ISOBUS Network
Aim of Test Case Generation Video Signal TFT Display SignalMachine CAN Analog Signals From Linear Motors PTD CAN Joystick Input Basic Actions Implement ECU ISOBUS Joystick ISOBUS VT ISOBUS Network
Deviation | 1 • Electromagnets and hydraulic distributor replaced by linear motors • No speed or position sensors are connected to LEGO Technic motors • Feedback Loop has been eliminated from the Simulink Model (as well as PID Block) • Bucket and Arm are controlled in open loop
Deviation | 2 • This won’t affect TCG results • Only initial and final values are considered; No sampling during the transient period • PID Block operates during transient periods
PID Response • Open Loop System • Open Loop Response:
PID Response • System with PID • Closed Loop Response: