Download
1 / 13
130 likes | 288 Views
Auto Tuning Neuron to S liding Mode Control. Application of an Auto-Tuning Neuron to Sliding Mode Control Wei-Der Chang, Rey-Chue Hwang, and Jer-Guang Hsieh IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART C: APPLICATIONS AND REVIEWS, VOL. 32, NO. 4, NOVEMBER 2002 教授:王明賢 學生:王富生

E N D
Auto Tuning Neuron to Sliding Mode Control Application of an Auto-Tuning Neuron to Sliding Mode Control Wei-Der Chang, Rey-Chue Hwang, and Jer-Guang Hsieh IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART C: APPLICATIONS AND REVIEWS, VOL. 32, NO. 4, NOVEMBER 2002 教授:王明賢 學生:王富生 學號:4992c106
Directory Abstract INTRODUCTION AUTO-TUNING NEURON CONTROL STRUCTURE AND TUNING ALGORITHM ILLUSTRATIVE EXAMPLES CONCLUSION REFERENCES
Abstract This paper presents a control strategy that incorporates anauto-tuning neuron into the sliding mode control (SMC) in order to eliminatethe high control activity and chattering due to the SMC. The maindifference between the auto-tuning neuron and the general one is that amodified hyperbolic tangent function with adjustable parameters is mployed. In this proposed control structure, an auto-tuning neuron is thenused as the neural controller without any connection weights.. The controllaw will be switched from the sliding control to the neural control, when thestate trajectory of system enters in some boundary layer. In this way, thechattering phenomenon will not occur. The results of numerical simulationsare provided to show the control performance of our proposed method. Index Terms—Auto-tuning neuron, Lyapunov approach, sliding modecontrol (SMC), switching control.
INTRODUCTION A useful and powerful control scheme to deal with the existenceof the model uncertainty, or imprecision, is the sliding mode control(SMC) . As we know, the model uncertainty or imprecision mayarise from insufficient information about the system or from the purposefulsimplification of mathematical model representation of plant,e.g., order reduction. The control law of SMC, however, is an intenseswitching action similar to that of bang-bang control, when the statetrajectory of system reaches around the sliding surface. This leads tothe appearance of chattering across the sliding surface and may excitethe high-frequency unmodeled dynamics of the system, undesirable inmost real applications. A simple method for solving the discontinuouscontrol law and chattering action is to introduce a boundary layer. Thismethod, however, does not ensure the convergence of the state trajectoryof system to the sliding surface, and probably results in the existenceof the steady-state error. In addition, analysis of a system dynamicswithin the boundary layer is very complicated .
For solving the drawbacks, a number of studies have been published. In , a control strategy was proposed based upon an on-line estimatorconstructed by a recurrent neural network to eliminate the chattering. In, the controller consists of the traditional SMC and Gaussian neuralnetwork. At the beginning, the SMC is used to force the state trajectoryof system toward the sliding surface. Then the control law is switchedfrom the SMC to Gaussian neural network control if the state trajectoryof system reaches the boundary layer. A fuzzy-neural network similarto that in was employed to replace the SMCwhen the state trajectoryof the system is within the boundary layer . In this paper, a simple neural controller will be proposed to solvethe drawbacks. The neural controller is constructed by using only oneauto-tuning neuron with three adjustable parameters with no weightconnection. The difference between the auto-tuning neuron and thegeneral neuron is that a newmodified hyperbolic tangent function a[1+exp(-bx)]^-1[1-exp(-bx)] is used as its activation functionwhere the two parameters a and b are adjustable.
Hence, the outputrange and shape of this function are free and will not be restricted in acertain interval. The applicability and flexibility of the proposed neuralcontroller are promising. Comparison with the traditional multilayerneural network controller, the complicated architectures and the heavycomputation for updating parameters can be simplified and reducedgreatly. In fact, it is not necessary to require so many adjustable parametersfor a direct adaptive neural controller. In a real on-line controlprocess, a full connection neural controller will also affect the reactiontime of the overall control system, and undoubtedly increase the difficultyfor hardware implementation. The main purpose in this study is to combine a proposed auto-tuningneuron with the SMC for a class of simple nonlinear systems. Thesingle auto-tuning neuron used as the direct adaptive neural controllerwill be activated and replace the SMC when the state trajectory ofsystem goes into the boundary layer in order to eliminate the chatteringresulting from the SMC. The detailed control structures and adaptationlaws of this method will be described in the next section.
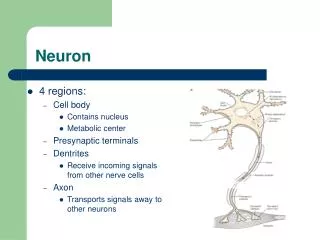
AUTO-TUNING NEURON In order to eliminate the high-frequency control and chatteringaround the sliding surface caused by the SMC, we now introduce anauto-tuning neuron to be the direct adaptive neural controller to replacethe SMC, when the state trajectory of system goes into the boundarylayer
where the activation function h( ) : < ! <is a modified hyperbolic tangent function; a is the saturated level; and b is the slope value. Note,that these two adjustable parameters, a and b, influence mainly theoutput range and the curve shape of this activation function, as shownin Fig. 2. In this case, since the output range of u2 can be automaticallytuned according to certain adaptation mechanism, it is unnecessaryto consider the scaling problem of the controller. For convenience,let = [‘; a; b]T 2 <3 represent the vector of adjustable parameters.Wewish to adjust , such that, the control objective can be achieved.
CONTROL STRUCTURE AND TUNING ALGORITHM In this study, the control structure using an auto-tuning neuron withthe SMC can be schematically shown in Fig. 3, where u1 is the slidingcontrol defined in (6); u2 is the neural control defined in (10); andu = d(u1; u2) is a function of u1 and u2 defined byIn (11), s(e) is a scalar function described in (5); > 0 is the boundarylayer thickness; is a small positive value to form an intermediate region
is a function of error e used as a weighting factor of u1 and u2. From(11) and (12), we know that (e) 2 (0; 1]. The overall control procedurecan be summarized as follows. First, if the initial state of systemis outside the boundary layer, then it is subject to the sliding controlu1 forcing the state trajectory toward the boundary layer. Second, if itgoes near the boundary layer, i.e., entering in the intermediate region,let the control input u be a convex combination of u1 and u2 such thatthe control switching between u1 and u2 can be smooth and continuous. Finally, only the adaptive neural control u2 is activated when itenters in the boundary layer.
ILLUSTRATIVE EXAMPLES To illustrate the use of the proposed method, the following two examplesare provided. Note, that the sampling time is set to be 0.02 inthese simulations. Our control objective is to regulate the system output x to the desiredoutput xd = 0. For instance, with the initial state x(0) = 1:5, Fig. 5shows the results by using the traditional SMC. Fig. 6 shows the resultsby using our proposed method. It can be easily seen from Fig. 5 that thehigh-frequency control and the chattering around x = 0have occurred. From Fig. 6, we conclude that the control input is modulated and itsoutput state x is asymptotically controlled to the desired value xd = 0by using the proposed method.
CONCLUSION In this paper, we have proposed a control strategy that consists ofa general SMC and a neural control constructed by an auto-tuningneuron. In order to eliminate the high control activity and chattering dueto the SMC, the control law here is smoothly switched from the slidingcontrol to the neural control, when the state trajectory of system entersin some boundary layer. Thus, the chattering phenomenon aroundthe sliding surface will never occur. For the adaptive neural control, wehave presented a stable tuning mechanism based on the Lyapunovstabilitytheory to guarantee the convergence of the system output. Fromthe results of two numerical simulations, we conclude that the proposedmethod can perform successful control. It is interesting to consider theswitching between SMC and PID control, whether the PID control isproduced by some classical rules, e.g., Ziegler-Nichols tuning, or byrules based on auto-tuning neurons. The latter is still under our investigation.No fair comments can be made at this point.
REFERENCES [1] J. J. E. Slotine and W. P. Li, Applied Nonlinear Control. EnglewoodCliffs, NJ: Prentice-Hall, 1991. [2] Y. Fang, T.W. S. Chow, and X. D. Li, “Use of a recurrent neural networkin discrete sliding-mode control,” in Proc. Inst. Electr. Eng., ControlTheory Appl., vol. 146, Jan. 1999, pp. 84–90. [3] R. M. Sanner and J. J. E. Slotine, “Gaussian networks for direct adaptivecontrol,” IEEE Trans. Neural Networks, vol. 3, pp. 837–863, Nov. 1992. [4] F. P. Da andW. Z. Song, “Sliding mode adaptive control based on fuzzyneural networks,” Control and Decision, vol. 13, no. 4, pp. 301–305,1998. in Chinese. [5] C. T. Chen andW. D. Chang, “A feedforward neural network with functionshape autotuning,” Neural Netw., vol. 9, no. 4, pp. 627–641, 1996. [6] W. D. Chang, R. C. Hwang, and J. G. Hsieh, “Adaptive control of multivariabledynamic systems using independent self-tuning neurons,” inProc. 10th Int. Conf. Tools with Artificial Intelligence, Taipei, Taiwan,R.O.C, 1998, pp. 68–73. [7] L. X. Wang, A Course in Fuzzy Systems and Control. EnglewoodCliffs, NJ: Prentice-Hall, 1997.