Download
1 / 1
10 likes | 170 Views
Efficient Discriminative Learning of Parts-based Models. Aim: To efficiently learn parts-based models which discriminate between positive and negative poses of the object category. ISVMs run for twice as long. Efficient Reformulation. Results - Sign Language. Exponential in |V|.

E N D
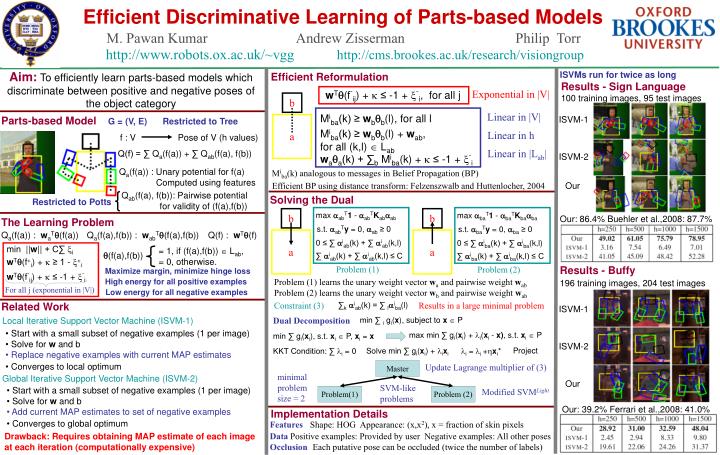
Efficient Discriminative Learning of Parts-based Models Aim:To efficiently learn parts-based models which discriminate between positive and negative poses of the object category ISVMs run for twice as long Efficient Reformulation Results - Sign Language Exponential in |V| wT(f-ij) + ≤ -1 + -i, for all j 100 training images, 95 test images b Linear in |V| Miba(k) ≥ wbb(l), for all l Parts-based Model ISVM-1 a G = (V, E) Restricted to Tree Miba(k) ≥ wbb(l) + wab, for all (k,l) Lab Linear in h f : V Pose of V (h values) Linear in |Lab| Q(f) = ∑ Qa(f(a)) + ∑ Qab(f(a), f(b)) ISVM-2 waa(k) + ∑b Miba(k) + ≤ -1 + -i Qa(f(a)) : Unary potential for f(a) Computed using features Miba(k) analogous to messages in Belief Propagation (BP) Efficient BP using distance transform: Felzenszwalb and Huttenlocher, 2004 Our Qab(f(a), f(b)): Pairwise potential for validity of (f(a),f(b)) Solving the Dual Restricted to Potts b b max abT1 - abTKabab max baT1 - baTKbaba Our: 86.4% Buehler et al.,2008: 87.7% The Learning Problem s.t. abTy = 0, ab ≥ 0 s.t. baTy = 0, ba ≥ 0 Qa(f(a)) : waT(f(a)) Qa(f(a),f(b)) : wabT(f(a),f(b)) Q(f) : wT(f) a a 0 ≤ ∑ iab(k) + ∑ iab(k,l) 0 ≤ ∑ iba(k) + ∑ iba(k,l) min ||w||+ C∑i = 1, if (f(a),f(b)) Lab, = 0, otherwise. (f(a),f(b)) ∑ iab(k) + ∑ iab(k,l) ≤ C ∑ iba(k) + ∑ iba(k,l) ≤ C wT(f+i) + ≥ 1 - +i Results - Buffy Problem (1) Problem (2) Maximize margin, minimize hinge loss wT(f-ij) + ≤ -1 + -i Problem (1) learns the unary weight vector wa and pairwise weight wab High energy for all positive examples 196 training images, 204 test images For all j (exponential in |V|) Low energy for all negative examples Problem (2) learns the unary weight vector wb and pairwise weight wab Related Work Constraint (3) ∑kiab(k) = ∑ liba(l) Results in a large minimal problem ISVM-1 Dual Decomposition min ∑ i gi(x), subject to x P Local Iterative Support Vector Machine (ISVM-1) • Start with a small subset of negative examples (1 per image) max min ∑ gi(xi) + i(xi - x), s.t. xi P min ∑ gi(xi), s.t. xi P, xi = x • Solve for w and b ISVM-2 Project Solve min ∑ gi(xi) + ixi KKT Condition: ∑ i = 0 i = i +xi* • Replace negative examples with current MAP estimates • Converges to local optimum Master Update Lagrange multiplier of (3) minimal problem size = 2 Global Iterative Support Vector Machine (ISVM-2) Our SVM-like problems • Start with a small subset of negative examples (1 per image) Modified SVMLight Problem(1) Problem (2) • Solve for w and b Our: 39.2% Ferrari et al.,2008: 41.0% • Add current MAP estimates to set of negative examples Implementation Details • Converges to global optimum Features Shape: HOG Appearance: (x,x2), x = fraction of skin pixels Data Positive examples: Provided by user Negative examples: All other poses Drawback: Requires obtaining MAP estimate of each image at each iteration (computationally expensive) Occlusion Each putative pose can be occluded (twice the number of labels)