Download
1 / 21
230 likes | 483 Views
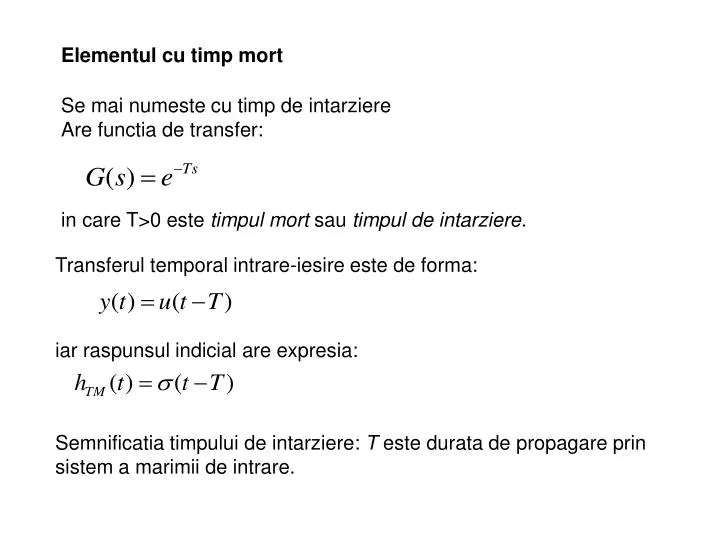
Elementul cu timp mort. Se mai numeste cu timp de intarziere Are functia de transfer:. in care T>0 este timpul mort sau timpul de intarziere. Transferul temporal intrare-iesire este de forma:. iar raspunsul indicial are expresia:.

E N D
Elementul cu timp mort Se mai numeste cu timp de intarziereAre functia de transfer: in care T>0 este timpul mort sau timpul de intarziere. Transferul temporal intrare-iesire este de forma: iar raspunsul indicial are expresia: Semnificatia timpului de intarziere: T este durata de propagare prin sistem a marimii de intrare.
Exemplu: transportor cu banda. Daca se iau in considerare numai fenomenele de transport, atunci se poate scrie: Elementul cu timp mort este liniar si invariant in timp. Functie transcendenta in care are loc transport spatial de substanta, transfer spatial de energie sau transmisie la distanta a semnalelor.
Functia de transfer a unui element cu timp mort poate fi aproximata prin dezvoltarea in serii de puteri a exponentialei Formula utilizata pentru simularea analogica sau numerica a unui element cu timp mort.
Performantele sistemelor Atunci când se lucrează cu un sistem fizic se urmăresc etapele:1. Se determină ecuaţiile de funcţionare ale sistemului;2. Se determină schema bloc funcţională a sistemului precum şi funcţiile de transfer care descriu elementele schemei bloc;3. Se analizează sistemul din punct de vedere al răspunsului pentru diferite tipuri de mărimi de intrare.Răspunsurile obţinute sunt comparate ajungându-se la anumite concluzii.
Asemanari Deosebiri • primul sistem nu depăşeşte valoarea de regim staţionar; • primul sitem are un răspuns indicial aperiodic(al doilea are răspuns oscilant amortizat); • al doilea sistem atinge valoarea de regim staţionar mai repede decât primul sistem. • valoarea de regim staţionar ale răspunsurilor indiciale ale celor două sisteme este aceeaşi; • valoarea de regim staţionar h(s) este obţinută după acelaşi interval de timp pentru un astfel de sistem;
Dacă nu se ştie ordinul celor două sisteme atunci se va căuta ca ele să fie aproximate cu nişte sisteme care au o funcţionare binecunoscută (sistemele de ordinul I şi II).Dacă pentru sistemul al doilea răspunsul seamănă destul de de bine cu cel al unui element T2 pentru primul sistem nu se poate face o aproximare cu un T1 pur.Se poate considera că primul sistem pe intervalul (0, t2) nu răspunde şi,prin urmare,această valoare t2 va purta denumirea de timp mort. Corespunzător, în răspunsul sistemului care aproximează sistemul iniţial va apare o exponenţială datorată acestui timp mort. Observatii
Indici de performanta Abilitatea de a obtine un anumit regim permanent (stationar) si un anumit regim tranzitoriu rezida in alegerea adecvata a structurii si parametrilor regulatorului in conditiile in care celelalte elemente ale sistemului sunt, de regula fixate.
Indici de performanta LOCALI de regim stationar de regim tranzitoriu eroarea stationara Suprareglaj Timp de raspuns Timp de crestere
Indici de performanta locali – valori admisibile Pentru eroarile stationare: acestea trebuie sa aiba valori compatibile cu clasa de precizie a traductorului. Clasa de precizie a unui sistem nu poate fi in nici un caz mai buna decat clasa de precizie a traductorului utilizat. Suprareglaj: σ% in intervalul 18-20% Timp de raspuns (durata regimului tranzitoriu) si timp de crestere: compatibile cu posibilitatile reale ale instalatiei. Exista limitari in ceea ce priveste limitele de variatie a marimilor de intrare si de iesire. Aceste limitari au caracter tehnologic (saturatie, puteri nominale limitate etc.
Indici de performanta GLOBALI Pot exista mai multe solutii care realizeaza indicii de calitate. Se definesc niste indicatori sintetici de calitate care inglobeaza toate aspectele avute in vedere la definirea indicilor de calitate pe raspunsul indicial al sistemului. Un indice de performanta global asigura o apreciere globala a calitatilor unui sistem. El se exprima printr-un numar real, pozitiv si poate fi calculat si masurat experimental. Uzual se doreste minimizarea valorii indicatorului.
Indici de calitate globali 1. ISE (integral of the square of the error) 2. IAE (integral of the absolute magnitude of the error)
Indici de calitate globali - continuare 3. ITAE (integral of the time multiplied by the absolute magnitude of the error) 4. ITSE (integral of the time multiplied by the square of the error)
Simbolizarea operatoriala a sistemelor dinamice liniare Prin utilizarea elementelor de transfer tipice se pot alcatui structuri avand fdt oricat de complicate. Simbolurile P, I, D, T si TM se utilizeaza in combinatii si cu indici adecvati pentru caracterizarea operatoriala a oricarui sistem dinamic, atunci cand se cunoaste functia lui de transfer.
Simbolizarea operatoriala a sistemelor dinamice liniare - cont • Algoritm: • se fac toate simplificarile factorilor comuni de la numaratorul si numitorul lui G(s); • numaratorul contine un polinom, eventual inmultit cu fdt a unui element TM; • Daca G(s) are p poli in origine, se scoate in factor comun sp; • se impart toti termenii polinomului de la numaratorul lui G(s), unul cate unul, la sp; • expresia de la numarator se simbolizeaza prin P, I, D (dupa caz cu indicii corespunzatori), considerand termenii ca functii de transfer ale unor elemente conectate in paralel; • inversul polinomului de la numitorul lui G(s) este fdt a unui element T conectat in serie cu grupul elementelor asociate numaratorului, respectiv P, I, D si TM; • simbolul operatorial are forma:
Exemplu: Se considera fdt:
LEGI DE REGLARE Legea de reglare este, de obicei, materializata de regulator.Exista situatii cand unele componente ale legii de reglare pot fi localizate in partea fixata a sistemului. In acest caz, componenta exista in mod natura si este folosita ca atare, nemaifiind necesara introducerea unei componente similare in regulator (componenta integratoare care poate exista in mod natural in partea fixata). Regulatoare realizate cu amplificatoare operationale Un amplificator operational este constituit dintr-un Acc la care se adauga un circuit de intrare (impedanta Z1(s)) si un circuit de reactie (impedanta Z2(s))
Amplificatorul operational se caracterizeaza prin: - factorul de amplificare K0 este foarte mare pentru un domeniu larg de frecvente;- rezistentele de intrare si de iesire au valoare foarte mare si respectiv foarte mica. Ecuatiile de functionare - pentru nodul N - pentru circuitul de intrare - pentru circuitul de reactie - pentru Acc
Se elimina I1(s), I2(s) si UN(s) intre ecuatiile anterioare: Factor de corectie Fdt ideala