Download
1 / 51
510 likes | 653 Views
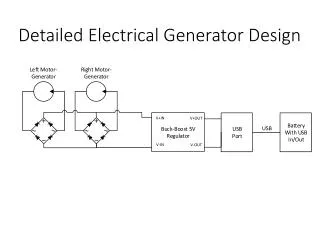
FIRST Electrical Design. Michael Dessingue College Mentor - Hudson Valley Community College mdessingue@nycap.rr.com Team 250 Steve Shade Controls and Simulation Engineer – Rolls-Royce steven.shade@rolls-royce.com Teams 1111 & 7 Al Skierkiewicz Broadcast Engineer - WTTW-TV

E N D
FIRST Electrical Design Michael Dessingue College Mentor - Hudson Valley Community College mdessingue@nycap.rr.com Team 250 Steve Shade Controls and Simulation Engineer – Rolls-Royce steven.shade@rolls-royce.com Teams 1111 & 7 Al Skierkiewicz Broadcast Engineer - WTTW-TV Askierkiewicz@networkchicago.com Team 111
Overview • Electrical kit and IFI Hardware • Layout and Planning • Resistance and Ohm’s Law • Electrical Tools • Myth-Busting • Questions
Planning Your Electrical System • Plan, create drawings just like mechanical systems • Create a test bed early • Use test bed to test all systems before integrating • Communicate effectively with the mechanical sub-teams early and often • Document everything
General Layout Tips • Label and/or Color Code Everything • Secure wire so a hit from another robot doesn't stretch the wiring to a breaking point or pull a terminal out of a breaker, victor or spike • When in doubt, insulate • Secure the battery so it doesn't fall out • Leave some slack in wire to allow for swapping of parts • Be careful when running wiring through frame members so that mech heads don't drill into it at some point down the road
FIRST Electrical Problem How much voltage is lost in a typical FIRST circuit?
Ohm’s Law By Ohm’s Law: V = I * R 12 V = I * 24 W I = 0.5 A + _ 12 VBattery 24 W
Typical FIRST Circuit 120 A Circuit Breaker Victor 884 Speed Controller + _ 40 A Circuit Breaker VoutMeasured 12 VBattery Assuming the Victor 884 Speed Controller is given an input signal of 254 from the Robot Controller, how much voltage is output to the device?
Typical FIRST Circuit 120 A Circuit Breaker Victor 884 Speed Controller + _ 40 A Circuit Breaker VoutMeasured 12 VBattery Circuit consists of 8’ of #6, 4’ of #10, and 2’ of #10. 14 Connections in the circuit
More Wire Adds More Resistance • “Standard Wire Foot” - A 10 gauge wire will drop about 0.1 volt per foot at the stall current of any of the drive motors. • There is resistance in every wire • .001 ohm/ft #10 wire • .0004 ohm/ft #6 wire
Typical FIRST Circuit Resistances: 8’ #6 = 0.0032 W 6’ #10 = 0.0060 WRtotal = 0.0092 W Steady State Current: 40 A Voltage Drop = I*R = 40 A * 0.0092 W = 0.368 V Max Voltage at Device = 12V - 0.368V = 11.632 V
Typical FIRST Circuit Resistances: 8’ #6 = 0.0032 W 6’ #10 = 0.0060 WRtotal = 0.0092 W CIM Motor Stall Current: 114 A Voltage Drop = I*R = 114 A * 0.0092 W = 1.05 V Max Voltage at Device = 12V - 1.05V = 10.95 V At Stall Current of CIM, Max Voltage at the CIM motor for the same current path is 10.95V!
Reducing Resistance • Check every crimp to make sure the wires do not move or turn when pulled • Use the correct tool for the job • Solder all critical joints • Shorten the length of your wires (also helps in keeping things neat and traceable)
Crimp Connections • Buy a good crimper for about $20 • Home Depot, Lowes Electrical Sections • Many Auto Parts Stores also stock crimpers • Look for crimper with good handles and can used with wire gauges 10 to 24
Soldering • Good Practice to solder all connections where high currents exist • Use Appropriate Size iron for the job • Use a Rosin Core Solder for all electronics
Other Required Tools • Multimeter (DMM) • Voltage • Resistance • Continuity • Wire Strippers • Re-strip any wires where copper strands are lost
The RC, OI, Victors and Spikes need external components to run (i.e. capacitors, voltage regulators, etc.) IFI has done a good job of designing the power and internal circuitry of all the kit electronic components. There is no additional circuitry required for reliable operation. The fan that is mounted on the speed controller is required though and most teams will wire this fan to the controller power input. The fan then becomes an indication of good input power to the controller.
The controllers can’t go from forward to reverse quickly. The speed controllers do exactly what you tell them to do. Your robot cannot make the sudden changes you are demanding for other reasons related to mechanical design and physics. You cannot hope that the control system will overcome all other losses. It does not have the power resources to overcome the momentum of a charging 130 lb. robot and change it’s direction.
The controllers and motors are not matched, the switching is all wrong. This may seem to be the case, but the components work very well together. All teams use the same motors and drive components so there is no disadvantage to any team using the supplied parts.
The OI says my battery voltage is 10.5 but my voltmeter reads 12 at the battery. It must be broken. Your RC voltage monitor accurately reads the voltage that is present at it’s input. If your RC reads 10.5 volts, there is considerable loss in the wiring and connections. Check that you have connected the RC to the #1 or #2 positions on the breaker panel and check that your connectors are well crimped and are tight and fully engaged on the push on connections.
The battery is too small. The battery is actually very powerful. Most teams have no problem driving a 130 pound robot for more than two matches with the kit battery. If your robot drains a charged battery by the end of a match, the mechanical design is inefficient or you are using some form of tank drive. (treads or four or more non-steering drive wheels)
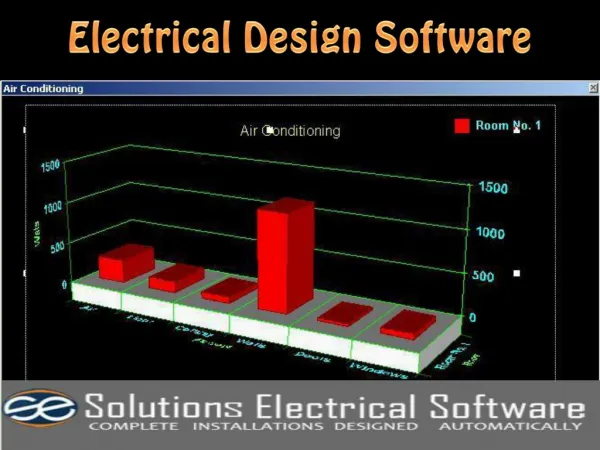
TYPE ES18-12 CAPACITY 5HR 3.06A 15.3 AH 1HR 10.80A 10.8 AH 1C 18.0A 9.0 AH INTERNAL RESISTANCE APPROX. 15m MAX. DISCHARGE CURRENT 230 A (5 SEC.) MAX. CHARGE CURRENT 5.34
The main battery cannot be used lying down. The main battery can be used in any orientation, including upside down. It can be charged in any direction except upside down. Battery terminals must be protected at all times and the battery must be secured in the robot. You can’t play when your battery is lying on the field.
A sparking motor is defective Sparks are normal in DC brush type motors. The magnetic fields in a motor generate high voltages that spark across gaps in the brush assembly. Motors that are working hard or have worn brushes produce more sparking.
I can only get 11 volts at my motor running. The breaker panel is defective. This actually is an effect of the some of the principles discussed earlier. High currents in the wires we use result in some voltage drop. Measuring at the motor, is in effect, compensating for this loss. Remember the wire foot, every foot of #10 at stall drops 0.1 volts. A one volt drop is an indication you have 10 wire feet of loss on the robot between the battery and the motor. This could be two 10 gauge wires, five feet long, or four feet and a speed controller or three feet, a speed controller and a breaker and some connectors.
The backup battery is disconnected when you power off. According to the RC manual, Team LEDs (and the backup circuit in the RC) will go out after four seconds if the RC has not established contact with an OI connected to the arena controller. If an arena controller is connected and a link has been established, the RC will shut down about four minutes after main power has been removed. The backup battery supplies current to the RC, modem, servos and team LEDs when the main battery has fallen below about 7.2 volts. You must hit reset to save the backup.
My Chalupa is only running a light load but it keeps tripping the breaker, the breaker must be defective. A current monitor would verify what the motor current actually is. Many manufacturers make clamp on probes that will monitor current for use with you multimeter. If the motor current is high check that there isn’t a problem in the drive system by running the robot with the wheels off the ground. If motor current is normal, suspect bearing side loads, misaligned wheels, etc. If it is high, remove the motor from the transmission and try again, if it is high suspect a defective motor, if low, suspect a problem in the transmission.
I don’t need to insulate the black wire The black wire carries the same current as the red wire it is paired with. By insulating both wires, you are “backing up the backup”. If the insulation on a wire fails, the insulation on the other wire keeps the electrical system safe. (backup the backup is a common method used by NASA and others to insure safety, reliability.) The black wire on the motors are not connected to battery negative all the time.
Main circuit breaker is vibration sensitive it needs to be shock mounted. This was true of the old panel type breaker, but it is not true if the breaker supplied in your kit this year or last. These breakers were designed to be used in vehicles and boats. A few have turned up this season that were sensitive to light tapping on the red disconnect button. These are defective breakers and should be replaced.
Protect the radio by putting it down inside the robot. It is important to protect the radio modem and the rubber antenna that sticks out the top. To mount it down inside all of the metallic parts, motors and transmissions, is reducing is ability to communicate with the OI modem. The robot modem needs to be mounted in a protected area with the antenna vertical and as far from metallic structures as possible.
The antenna on the robot can be anywhere in any orientation, same with the OI. Antenna coupling is greatest when the antennas are mounted in the same orientation. Coupling is minimum when the antennas are mounted 90 degrees apart. The radios still appear to work but the margin of good signal is vastly reduced.
The IFI control system is awful, my robot keeps cutting out. A robot that cuts out on the field is most often a result of input power to the RC falling below 7 volts. A high current draw when running will take the battery voltage down temporarily. The RC will go to backup and shut down while the input voltage is low. When it returns, the RC will act normally. Occasionally a modem problem may occur on the field, the IFI reps are monitoring every robot and can tell most problems from their monitoring station.
#4 wire is way better than #6. This is partly true. If you are running a long distance with the primary wiring and you can stand the extra weight, then 4 gauge may be a good choice. Mating 4 gauge to the Anderson connector is a problem for most teams. For short runs and the best weight savings, 6 gauge is perfectly fine.
Soldering is better than crimping. Manufacturers crimp contacts all the time and the military requires crimping only. The big difference is the crimp is made with a very expensive crimp tool or by machine. For our purposes, a soldered connection adds a little insurance to the connection. A good soldered joint is one that is mechanically sound to start with. Crimp first, then solder, then insulate.
A motor will run at free speed if you connect it to a battery. The motor specifications are recorded under very strict testing guidelines and using equipment that takes away any variables in testing. The motor may get you close to tested specifications but don’t expect to duplicate results in your shop with a battery.
The electrical rules don’t meet electrical practice. (NEC) The electrical rules attempt to follow NEC guidelines if you check the “open air” tables. This allows a #12 wire to be used in open air where a #10 for the same current must be used in conduit. I personally prefer to use #10 for all high current wiring on the robot, and #18 for the lower current valves and RC.
10. The motors do not have large enough wire. The wire supplied with all motors is designed by the manufacturer for use with these motors. The wires although undersized, are fairly short and will add very little loss to the system. Put the controller close to the motor if you think you need to reduce the loss. If you shorten the leads and add connectors to get a larger gauge wire, you won’t gain an advantage. Note: The Chalupa motor may be damaged if you open it.
9. Wire is wire is wire. Not really. There are various styles of wire, based on your need for flexibility. These wires have distinctly different reactions to connectors. Superflex wire(137 strands) in an SLU70 type connector will pull out making a high resistance connection and it is difficult to strip without cutting or breaking strands. A low strand (9 or 17) wire may be too hard to terminate with a manual crimper. It may also break with the repeated flexing encountered on our robots. The wire sizing rules this year allow you to make decisions on weight but in most case will be a disadvantage electrically. The drawing in the guide is misleading.
This is misleading. The wire does not go under the screw. It goes between the collar and the tab. Fine strands would be pulled up along the sides of the screw and very few would be held in place. The connector supplied last year was terminated as shown but could not terminate fine strand wire.
8. The battery could electrocute you, why do we use it? The voltage generated by this battery is not capable hurting anyone due to direct contact. The battery can still cause harm if misused. Shorts across the terminals can generate high amounts of heat capable of burning anyone who touches it. I have seen fires on the field and in the pit due to shorting out the battery. Keep battery terminals insulated at all times.
7. Battery connectors are too small, underrated. Although rated at 50 amps, the overall heat generated in the connector during a two minute match is low enough that teams do not need to worry. If the connector is improperly crimped, damaged or misaligned, or the robot design is significantly inefficient, some heating of the connector is possible and damage could be the result. I have seen little evidence of connector damage. Using alligator clips on the charger to connect to the Anderson battery connector will damage the surface.
6. The main battery cannot be used lying down. The main battery can be used in any orientation, including upside down. It can be charged in any direction except upside down. Battery terminals must be protected at all times and the battery must be secured in the robot. You can’t play when your battery is lying on the field. Also don’t pick up the battery by the wires, as internal damage will result.
5. My four wheel drive robot eats batteries, there is something wrong with control system. Four wheel or tank drive systems use incredible amounts of current when turning using high friction drive surfaces like belting or knobby tires. When a robot turns it must drag the wheels or treads sideways across the carpet. In a tight or fast turn, this high friction translates into near stall conditions for all the drive motors. The result is temporary current draw above 200 amps in a four motor drive. That may be enough to draw the voltage in the battery below RC minimum.
4. The backup battery is not used when the main power is shut off. According to the RC manual, Team LEDs (and the backup circuit in the RC) will shut down after four seconds if the RC has not established contact with an OI connected to the arena controller. If an arena controller is connected and a link has been established, the backup battery will still be connected to everything on the robot for up to four minutes after main power has been removed. With servos and LEDs, a lot of power is watsted. Press reset after every power off.
3. The battery has memory and needs to be discharged to zero. This is one of the most common myths. It arises from a particular type of NiCad battery behavior. Gel cell batteries do not have a memory that needs any special handling. Charge them normally with the supplied chargers and never at more than 6 amps.
2. The battery is too small. The battery is actually very powerful. Most teams have no problem driving a 130 pound robot for more than two matches with the kit battery. If your robot drains a charged battery by the end of a match, the mechanical design is inefficient or you are using some form of tank drive. (treads or four or more non-steering drive wheels). In a hard match or a restart, you may not have enough battery reserve to last two minutes.