Download
1 / 18
180 likes | 289 Views
Head. F. F. F. F. F. F. F. F. F. F. F. F. F. F. F. F. x. x. x. x. x. x. x. x. I3. k3. I4. B3. k3. B1. k1. k1. B3. B2. k2. I1. B2. B1. I2. k2. 2. 1. 4. 4. 2. 3. 1. 3. Upper Torso. Upper Torso. F. F. Arms. Head. Arms. Lower Body. Lower Body.

E N D
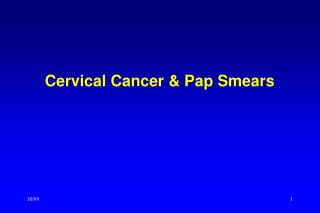
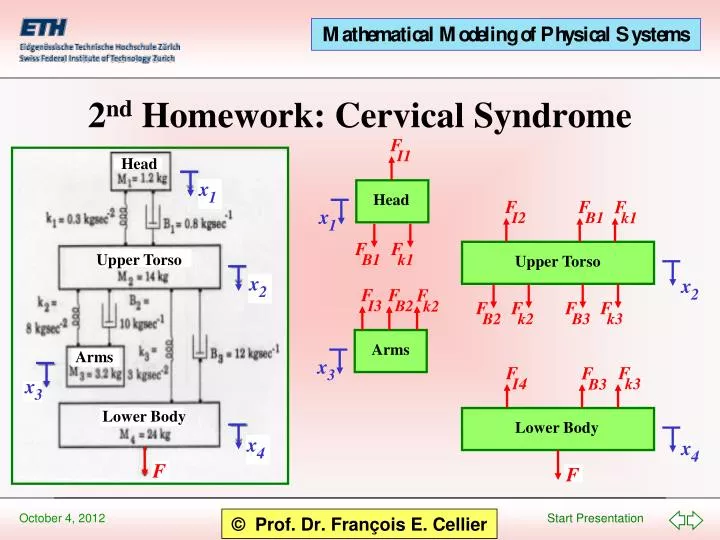
Head F F F F F F F F F F F F F F F F x x x x x x x x I3 k3 I4 B3 k3 B1 k1 k1 B3 B2 k2 I1 B2 B1 I2 k2 2 1 4 4 2 3 1 3 Upper Torso Upper Torso F F Arms Head Arms Lower Body Lower Body 2nd Homework: Cervical Syndrome
Derive a state-space model for this system. Since this is a linear time-invariant system, put it in linear state-space form and simulate the system in Matlab. Simulate the system during 15 seconds. Use a sinusoidal force (F) with a frequency of 1.5 Hz. As the system is linear, the amplitude of the input signal is irrelevant. 1.0 represents an excellent value. The output is the distance between the head and the shoulder. The initial conditions of all state variables may be assumed as 0.0. This is acceptable, since only the deviation of the output from the stationary position is of relevance. 1st Sub-problem
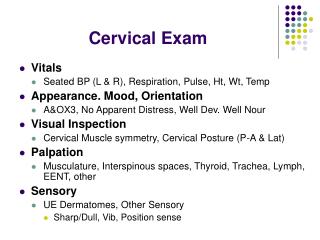
F(t) = FI4+ FB3 + Fk3 0 = FI3+ FB2 + Fk2 FB2 + Fk2 + FB3 + Fk3 = FI2 + FB1 + Fk1 FB1 + Fk1 = FI1 FB1 = B1· (v2 – v1 ) FB2 = B2· (v3 – v2 ) FB3 = B3· (v4 – v2 ) Fk1 = k1· (x2 – x1 ) Fk2 = k2· (x3 – x2 ) Fk3 = k3· (x4 – x2 ) F F F F F F F F F F F F F F F F x x x x k3 B3 B2 B1 k3 k1 B3 k2 I2 k2 B1 I3 I4 B2 I1 k1 3 1 4 2 Upper Torso F FI1 = m1· FI3 = m3· FI4 = m4· FI2 = m2· = v4 = v1 = v3 = v2 Arms Head dx3 dv1 dv4 dv3 dv2 dx4 dx1 dx2 dt dt dt dt dt dt dt dt Lower Body
F(t) = FI4+ FB3 + Fk3 0 = FI3+ FB2 + Fk2 FB2 + Fk2 + FB3 + Fk3 = FI2 + FB1 + Fk1 FB1+ Fk1 = FI1 F(t) = FI4+ FB3 + Fk3 0 = FI3+ FB2 + Fk2 FB2 + Fk2 + FB3 + Fk3 = FI2 + FB1 + Fk1 FB1 + Fk1 = FI1 dv1 FB1 = B1· (v2 – v1 ) FB2 = B2· (v3 – v2 ) FB3 = B3· (v4 – v2 ) Fk1 = k1· (x2 – x1 ) Fk2 = k2· (x3 – x2 ) Fk3 = k3· (x4 – x2 ) FB1 = B1· (v2 – v1 ) FB2 = B2· (v3 – v2 ) FB3 = B3· (v4 – v2 ) Fk1 = k1· (x2 – x1 ) Fk2 = k2· (x3 – x2 ) Fk3 = k3· (x4 – x2 ) FI1 = m1· dt dx1 = v1 dt dv2 FI2 = m2· FI1 = m1· FI4 = m4· FI2 = m2· FI3 = m3· dt dx2 = v2 = v2 = v1 = v3 = v4 dt dv3 FI3 = m3· dx1 dx2 dv3 dx3 dx4 dv1 dv2 dv4 dt dt dt dt dt dt dt dt dt dx3 = v3 dt dv4 FI4 = m4· dt dx4 = v4 dt
F(t) = FI4+ FB3 + Fk3 0 = FI3+ FB2 + Fk2 FB2 + Fk2 + FB3 + Fk3 = FI2 + FB1 + Fk1 FB1+ Fk1 = FI1 F(t) = FI4+ FB3 + Fk3 0 = FI3+ FB2 + Fk2 FB2 + Fk2 + FB3 + Fk3 = FI2 + FB1 + Fk1 FB1+ Fk1 = FI1 dv1 dv1 FB1 = B1· (v2 – v1 ) FB2 = B2· (v3 – v2 ) FB3 = B3· (v4 – v2 ) Fk1 = k1· (x2 – x1 ) Fk2 = k2· (x3 – x2 ) Fk3 = k3· (x4 – x2 ) FB1 = B1· (v2 – v1 ) FB2 = B2· (v3 – v2 ) FB3 = B3· (v4 – v2 ) Fk1 = k1· (x2 – x1 ) Fk2 = k2· (x3 – x2 ) Fk3 = k3· (x4 – x2 ) FI1 = m1· FI1 = m1· dt dt dx1 dx1 = v1 = v1 dt dt dv2 dv2 FI2 = m2· FI2 = m2· dt dt dx2 dx2 = v2 = v2 dt dt dv3 dv3 FI3 = m3· FI3 = m3· dt dt dx3 dx3 = v3 = v3 dt dt dv4 dv4 FI4 = m4· FI4 = m4· dt dt dx4 dx4 = v4 = v4 dt dt
FI4= F(t)- FB3 - Fk3 FI3 = - FB2 - Fk2 FI2= FB2 + Fk2 + FB3 + Fk3 - FB1 - Fk1 FI1= FB1+ Fk1 F(t) = FI4+ FB3 + Fk3 0 = FI3+ FB2 + Fk2 FB2 + Fk2 + FB3 + Fk3 = FI2 + FB1 + Fk1 FB1+ Fk1 = FI1 dv1 FB1 = B1· (v2 – v1 ) FB2 = B2· (v3 – v2 ) FB3 = B3· (v4 – v2 ) Fk1 = k1· (x2 – x1 ) Fk2 = k2· (x3 – x2 ) Fk3 = k3· (x4 – x2 ) FB1 = B1· (v2 – v1 ) FB2 = B2· (v3 – v2 ) FB3 = B3· (v4 – v2 ) Fk1 = k1· (x2 – x1 ) Fk2 = k2· (x3 – x2 ) Fk3 = k3· (x4 – x2 ) FI1 = m1· = FI3 / m3 = FI1 / m1 = FI4 / m4 = FI2 / m2 dt dx1 dx3 dx1 dx2 dx4 dv3 dv1 dv4 dv2 = v1 = v3 = v1 = v2 = v4 dt dt dt dt dt dv2 dt dt dt dt FI2 = m2· dt dx2 = v2 dt dv3 FI3 = m3· dt dx3 = v3 dt dv4 FI4 = m4· dt dx4 = v4 dt
= FI1 / m1 = FI2 / m2 dv1 dv2 dt dt = (FB2 + Fk2 + FB3 + Fk3 - FB1 - Fk1) / m2 = (B2· (v3 – v2 ) + k2· (x3 – x2 ) + B3· (v4 – v2 ) + k3· (x4 – x2 ) - B1· (v2 – v1 ) - k1· (x2 – x1 )) / m2 = (k1 /m2 ) · x1 - ((k1+k2+k3 )/m2 ) · x2 + (k2 /m2 ) · x3 + (k3 /m2 ) · x4 + (B1 /m2 ) · v1 - ((B1+B2+B3 )/m2 ) · v2 + (B2 /m2 ) · v3 + (B3 /m2 ) · v4 = (FB1+ Fk1 ) / m1 = (B1· (v2 – v1 )+ k1· (x2 – x1 )) / m1 = – (k1 /m1 ) · x1 + (k1 /m1 ) · x2 – (B1 /m1 ) · v1 + (B1 /m1 ) · v2
= FI3 / m3 = FI4 / m4 dv3 dv4 dt dt = (F(t)- FB3 - Fk3) / m4 = (F(t)- B3· (v4 – v2 ) - k3· (x4 – x2 )) / m4 = F(t) / m4 + (k3 /m4 ) · x2 - (k3 /m4 ) · x4 + (B3 /m4 ) · v2 - (B3 /m4 ) · v4 = (- FB2 - Fk2) / m3 = (- B2· (v3 – v2 ) - k2· (x3 – x2 )) / m3 = (k2 /m3 ) · x2 - (k2 /m3 ) · x3 + (B2 /m3 ) · v2 - (B2 /m3 ) · v3 y = x1 – x2
Derive a state-space model for this system. Since this is a linear time-invariant system, put it in linear state-space form and simulate the system in Matlab. Simulate the system during 15 seconds. Use a sinusoidal force (F) with a frequency of 1.5 Hz. As the system is linear, the amplitude of the input signal is irrelevant. 1.0 represents an excellent value. The output is the distance between the head and the shoulder. The initial conditions of all state variables may be assumed as 0.0. This is acceptable, since only the deviation of the output from the stationary position is of relevance. 1st Sub-problem
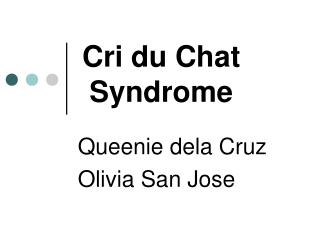
In order to be able to better analyze the resonance phenomena, we wish to obtain a Bode diagram of the system. To this end, we generate a logarithmic base of frequency values in the range from 0.01 Hz to 100 Hz by means of Matlab’s logspace function. The Bode function may now be used to compute the Bode diagram. The amplitude needs to be converted to decibels. Using the functions subplot, semilogx, grid, title, xlabel,and ylabel, the Bode diagram shall now be displayed on two separate graphs on the same page. 2nd Sub-problem
Finally, we wish to perform a sensitivity analysis. We want to study the variability of the spring constant and the damper between head and upper torso. For this purpose, we assume a variability of these two parameters of 50%. Repeat the frequency analysis for the four worst-case combinations of the two parameters. Plot the maxima and minima of the amplitude and phase curves as a sensitivity Bode diagram. 3rd Sub-problem