Download
1 / 15
150 likes | 332 Views
"Crash avoidance: when turning left is turning right." . Dr Roy Allen. Driving 1. With time and practice we get better at driving: Our actions become better co-ordinated; Our reaction times become quicker; Our situational awareness improves (Walker et al. 2009);

E N D
"Crash avoidance: when turning left is turning right." Dr Roy Allen
Driving 1 With time and practice we get better at driving: • Our actions become better co-ordinated; • Our reaction times become quicker; • Our situational awareness improves (Walker et al. 2009); • Our hazard perception improves (Hayworth & Mulvihill, 2006); • the ability to identify potentially dangerous traffic situations (Crick & McKenna, 1992); • “the process whereby a road user notices the presence of a hazard” (Evans & Macdonald, 2002, p.93).
Driving 2 Working Memory research (Kalyuga, S., Ayres, P., Chandler, P. & Sweller, J., 2003) suggests that: • Working memory limitations profoundly influence the character of human information processing and, to a considerable extent, shape human cognitive architecture (Sweller, 2003); • Short-term storage and processing limitations of human memory have been well-known for some time (e.g., Baddeley, 1986; Miller, 1956), i.e., only a few elements (or chunks) of information can be processed at any time without overloading capacity and decreasing the effectiveness of processing; • Conversely, long-term memory contains huge amounts of domain-specific knowledge structures that can be described as hierarchically organized schemas that allow us to categorize different problem states and decide the most appropriate solution moves.
Driving 3 • Controlled use of schemas requires conscious effort and, therefore, working memory resources. However, after having being sufficiently practiced, schemas can operate under automatic rather than controlled processing (Kotovsky, Hayes & Simon, 1985; Schneider & Shiffrin, 1977; Shiffrin & Schneider, 1977); • Automatic processing of schemas requires minimal working memory resources and allows problem-solving to proceed with minimal effort; • Once a particular skill is acquired, automatic processing can bypass working memory (Sweller, Van Merriënboer, & Paas, 1998). In other words, with enough practice, an activity can be carried out without conscious processing. For example, many individuals reach a stage in driving where their conscious, or working, memory is free for other activities. (See also Klein, Vincent & Isaacson, 1998)
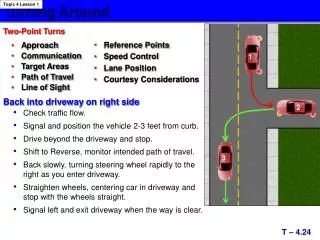
Driving 4 Steering has been with us all our lives, from long before we began to drive a car: • To move right we turn the wheel clockwise! • Thus, as car drivers, when suddenly presented with an obstruction in the inside lane of a dual-carriageway we “automatically” mobilise the necessary schema that guides our hands to turn the steering wheel clockwise and move the vehicle to the outside lane. • BUT . . .
Motorcycling 1 As of 2009 there were more than 27million powered two-wheelers (mopeds, scooters, motorcycles) in the EU (FEMA, 2009), and; • Motorcycles steer differently above and below about 30mph; • Below about 30mph they steer like all other vehicles, i.e.: • To move right we turn the handlebars clockwise! • Above about 30mph they COUNTER-STEER! i.e.: • To move left we turn the handlebars clockwise!!
Motorcycling 2 Counter-steering is counter-intuitive;
Motorcycling 3 • So alternative explanations, such as moving body-weight has been suggested:
Research 1 If we accept some notion of “expertise by schemas” then a fundamental theoretical question for Working Memory and Schema theory arises: • Considering the conflict between car and motorcycle steering, can only one schema per task be created, or can there be more than one? • If only one schema per task can be created, then this might suggest that conventional steering, because of our exposure to it from an early age, would determine the schema; • The consequence of this would be that motorcycling would never provide a similar level of automaticity to driving a car and, even in an emergency, only deliberate, conscious responses would be available; • This would add at least 400ms to hazard-avoidance reaction times and, potentially, would have huge implications for rider training;
Research 2 • “ . . . It is typical that the motorcycle rider must detect, decide and react to a traffic hazard in less than two seconds. Any significant delay in the hazard detection, decision and control action will preclude success of the collision avoidance. . .” (Hurt, Quellet & Thom, 1981, p.140); • In a fundamental surprise situation only those actions that are instinctive or which can be performed without command will be used (in an emergency, you will only do what you know), any strategies that need any conscious thought processes will immediately be abandoned. Hence, just knowing about a strategy will not be sufficient for that strategy to be implemented in an emergency (Hardy, 2006).
Research 3 • Alternatively, whichever type of vehicle we first learn to drive/ride might determine the schema, which again would have significant consequences since we could not rely upon fast, reflex responses for whichever vehicle we had learned to ride/drive second. • If more than one schema per task can be created, then in the event of a potential collision needing hazard avoidance, two conflicting schema (turn clockwise; turn anti-clockwise) would be triggered simultaneously: • This, potentially, might create a brief impasse during which no response would be forthcoming whilst the conflict was being resolved; • “. . . foremost in these data is the fact that 31.9% of the riders did NOTHING in the way of evasive action in the pre-crash time. . .” (Hurt, Quellet & Thom, 1981, p.143); • The consequence of this would be that we could never let motorcycling provide a similar level of automaticity to driving a car and, even in an emergency, we would have to rely upon deliberate, conscious responses.
According to the “Motorcycle Accident Cause Factors and Identification of Countermeasure”, also known as the ‘Hurt Report’, January 1981: • Approximately three-fourths of motorcycle accidents involved collision with another vehicle, which was most usually a passenger automobile; • the driver of the other vehicle violated the motorcycle right-of-way and caused the accident in two-thirds of those accidents; • The failure of motorists to detect and recognize motorcycles in traffic is the predominating cause of motorcycle accidents. The driver of the other vehicle involved in collision with the motorcycle did not see the motorcycle before the collision, or did not see the motorcycle until too late to avoid the collision; • Motorcycle riders in these accidents showed significant collision avoidance problems. Most riders would over brake and skid the rear wheel, and under brake the front wheel greatly reducing collision avoidance deceleration. The ability to counter steer and swerve was essentially absent; • 33, 107 motorcycle, scooter and moped riders died in crashes during just the period 2001 – 2005 within the then 15 countries of the EU (FEMA, 2009)
References 1 • Baddeley, A.D. (1986) . Working memory. Oxford: Oxford University Press. • Crick, J. & McKenna, F.P. (1992). Hazard perception: Can it be trained? Proceedings of Manchester University Seminar: Behavioural Research in Road Safety 2. • Evans, T. & Macdonald, W. (2002). Novice driver situation awareness and hazard perception. An exploratory study. Paper presented at the Road Safety Research, Policing and Education Conference, Adelaide, 2002. • FEMA (2009). A European Agenda for Motorcycle Safety: The Motorcyclists’ Point of View. • Hardy, B.T. (2006). How Close is Too Close: Concerning collisions with Cars • Haworth N.L. and Mulvihill C.M. A comparison of hazard perception and responding in car drivers and motorcyclists. In Proceedings 2006 International Motorcycle Safety Conference: The Human Element, Long Beach, California. • Hurt, H.H., Quellet, J.V. & Thom, D.R., (1981). Motorcycle accident cause factors and identification of countermeasures volume I: technical Report, Washington, D.C: US Department of Transportation, National Highway Traffic Safety Administration. HS-5-01160. • Kalyuga, S., Ayres, P., Chandler, P. & Sweller, J. (2003). The Expertise Reversal Effect. Educational Psychologist, 38(1), 23–31. • Klein, H.A., Vincent, E.J. & Isaacson, J.J. (1998). From managing the car to managing the road: The development of driving skills. Proceedings of the human factors and ergonomics society 42nd annual meeting, vols 1 and 2 ; book series: Human Factors and Ergonomics Society annual meeting proceedings, 1271-1275.
References 2 • Kotovsky, K., Hayes, J.R. & Simon, H.A. (1985). Why are some problems hard? Evidence from Tower of Hanoi. Cognitive Psychology, 17, 248-294. • Miller, G.A. (1956). The magical number seven, plus or minus two: Some limits on our capacity for processing information. Psychological Review, 63, 81-97. • Schneider, W. & Shiffrin, R.M. (1977). Controlled and automatic human information processing: I. Detection, search, and attention. Psychological Review,84, 1–66. • Shaffer, D. (2003). Applying Cognitive Load Theory to Computer Science Education. In M. Petre & D. Budgen (Eds) Proc. Joint Conf. EASE & PPIG 2003 (p.5) • Shiffrin, R.M. & Schneider, W. (1977). Controlled and automatic human information processing: II. Perceptual learning, automatic attending, and a general theory. Psychological Review ,84, 127–190. • Sweller, J. (2003). Evolution of human cognitive architecture. Psychology of Learning and motivation – Advances in Research and Theory, 43, 215 – 266. • Sweller, J., Van Merriënboer, J., & Paas, F. (1998). Cognitive architecture and instructional design. Educational Psychology Review 10(3):251-294. • Walker, G.H., Stanton, N.A., Kazi, T.A., Salmon, P,M. & Jenkins, D.P. (2009). Does advanced driver training improve situational awareness? Applied Ergonomics, 40, 678–687.