Download
1 / 20
250 likes | 510 Views
Chapter 10 - Rotation. In this chapter we will study the rotational motion of rigid bodies about a fixed axis. To describe this type of motion we will introduce the following new concepts: Angular displacement (symbol: Δθ ) Avg. and instantaneous angular velocity (symbol: ω )

E N D
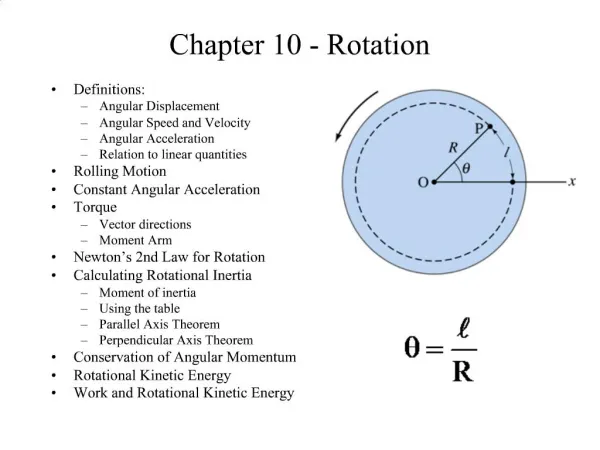
Chapter 10 - Rotation • In this chapter we will study the rotational motion of rigid bodies about a fixed axis. To describe this type of motion we will introduce the following new concepts: • Angular displacement (symbol: Δθ) • Avg. and instantaneous angular velocity (symbol: ω ) • Avg. and instantaneous angular acceleration (symbol: α ) • Rotational inertia, also known as moment of inertia (symbol I ) • The kinetic energy of rotation as well as the rotational inertia; • Torque (symbol τ ) • We will have to solve problems related to the above mentioned concepts.
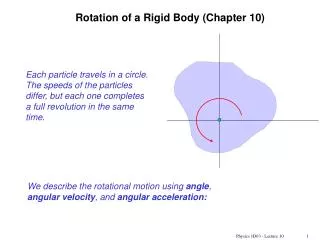
The Rotational Variables • In this chapter we will study the rotational motion of rigid bodies about fixed axes. • A rigid body is defined as one that can rotate with all its parts locked together and without any change of its shape. • A fixed axis means that the object rotates about an axis that does not move, also called the axis of rotation or the rotation axis. • We can describe the motion of a rigid body rotating about a fixed axis by specifying just one parameter. • Every point of the body moves in a circle whose centerlies on the axis of rotation, and every point moves through the same angle during a particular time interval.
Consider the rigid body of the figure. We take the z-axis to be the fixed axis of rotation. We define a reference line that is fixed in the rigid body and is perpendiculartothe rotational axis. The angular position of this line is the angle of the line relative to a fixed direction, which we take as the zero angular position. In Fig. 11-3 , the angular position is measured relative to the positive direction of the x axis.
From geometry, we know that is given by (in radians) (10-1) Here s is the length of arc (arc distance) along a circle and between the x axis (the zero angular position) and the reference line; r is the radius of that circle. This angle is measured in radians (rad) rather than in revolutions (rev) or degrees. The radian, being the ratio of two lengths, is a pure number and thus has no dimension. Because the circumference of a circle of radius r is 2r, there are 2 radians in a complete circle: (10-2) 1 rad = 57,30 = 0,159 rev (10-3)
Angular Displacement • If the body of Fig. 10-3 rotates about the rotation axis as in Fig. 10-4 , changing the angular position of the reference line from 1 to 2, the body undergoes an angular displacement given by: Δθ = θ2 – θ1(10-4) • This definition of angular displacement holds not only for the rigid body as a whole but also for every particle within that body. • An angular displacement in the counter-clockwise direction is positive, and one in the clockwise direction is negative.
Angular Velocity • Suppose (see Fig. 10-4 ) that our rotating body is at angular position 1 at time t1 and at angular position 2 at time t2. We define the average angular velocity of the body in the time interval t from t1 to t2 to be Unit of ω: rad/s or rev/s (10-5) Instantaneous angular velocity, ω: (10-6)
Angular Acceleration • If the angular velocity of a rotating body is not constant, then the body has an angular acceleration, α • Let 2 and 1 be its angular velocities at times t2 and t1, respectively. The average angular acceleration of the rotating body in the interval from t1 to t2 is defined as: (10-7) • Instantaneous angular acceleration, α: (10-8) Unit: rad/s2 or rev/s2 Do Sample Problems 10-1 & 10-2, p244-246
s O θ A (10-17) (10-18) (10-19) (10-20)
r O (10-22) (10-23) (10-8)
mi ri O (10-31) (10-32) (10-33) (10-34) (10-35)
In the table below we list the rotational inertias for some rigid bodies. (10-10)
Draaimoment (10-40) (10-41) (10-39) (10-13)
1 2 3 i ri O (10-42) (10-15)