Download
1 / 13
130 likes | 167 Views
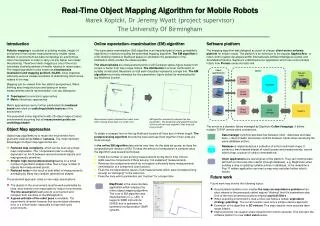
A Probabilistic Approach to Concurrent Mapping and Localization for Mobile Robots. S. Thrun, W. Burgard, and D. Fox. Problem. Map building: problem of determining the location of entities of interest To determine the location of entities-of –interest: the robot must know where it is

E N D
A Probabilistic Approach to Concurrent Mapping and Localization for Mobile Robots S. Thrun, W. Burgard, and D. Fox
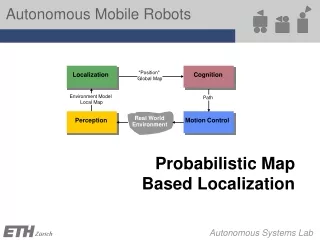
Problem • Map building: problem of determining the location of entities of interest • To determine the location of entities-of –interest: the robot must know where it is • To determine where it is: the robot must know the locations of the entities-of-interest • How can a robot construct a consistent map of an environment, if it occasionally observes a landmark? • Presents an algorithm that is based on rigorous statistical account on robot motion and perception
Motion model: The darker a value, the more likely it is that the robot is there Robot motion • : determines the probability that the robot is at
implies that after observing o, the robot’s probability of being at is proportional to the product of P(|m) and the perceptual probability P(o| ,m) Uncertainty of sensing landmarks Robot perception • : determines the likelihood of making observation 0 when the robot is at location , assuming that m is the correct model of the environment
Data, maps, and the map likelihood • Maps are built from data, by maximizing the likelihood of the map under the data • In statistical terms, the problem of mapping is the problem of finding the most likely map given the data
A function of the data d, the perceptual model P(o|m, ), and the motion model P(`|u, ) • Difficulty • Involving search in the space of all maps-space often dimensions • Evaluation of a single map would require integrating over all possible locations at all points in time (would require over more than variables) • Solution- EM algorithms • E-step: the current map is held constant and the probabilistic for the robot’s locations at the various points in times are estimated • M-step: the most likely map is computed based on the estimation result of the E-step
Maximum likelihood estimation • E-Step • A localization step with a fixed map • The current-best map and the data are used to compute probabilistic estimates for the robot’s position
Computation of the • Computation of the • The result of the E-step is an estimation of the robot’s location at the various points in time t
Maximum likelihood estimation (2) • M-step • implements a mapping step which operates under the assumption that the robot’s locations are known • Probability map of the environment is an assignment of probabilities ,where <x,y> is a location measured in global coordinates, and is a random variable that corresponds to the generalized landmark type at <x,y> • The M-step computes the most likely map under the assumption that accurately reflects the likelihood that the robot was at at time t
counts how often the generalized landmark l was observed from location <x,y>, divided by some generalized landmark was divided for that location
Caching: The motion model is computed in advance for each control in d and cached in a look-up table • Exploiting symmetry: Symmetric probabilities are stored in a computer • Coarse-grained temporal resolution: Locations are only estimated if at least one landmark has been observed, of if the robot moved 20m • Selective computation: Computation focuses on location whose probability is larger than threshold • Selective memorization: Only a subset of all probabilities are stored for each , namely those are above the threshold described above
Thesis • Robot simulation • 센서 데이터에 불확실성 추가 • 임무 • 1. 지능적 센서 데이터 해석을 위한 센서 해석 루틴의 진화 • 2. 처한 환경에 대한 반응 루틴 진화 • 3. 진화된 루틴들의 결합을 통한 제어 프로그램생성 • 4. 전체 GP 트리를 하나의 xc6200에 구현하기 위한 알고리즘 개발