Download
1 / 44
470 likes | 709 Views
A Probabilistic Approach to Collaborative Multi-robot Localization. Dieter Fox, Wolfram Burgard, Hannes Kruppa, Sebastin Thrun Presented by Rajkumar Parthasarathy and Sulen Thomas. Overview. Introduction Markov Localization Monte Carlo Localization Experimental results

E N D
A Probabilistic Approach to Collaborative Multi-robot Localization Dieter Fox, Wolfram Burgard, Hannes Kruppa, Sebastin Thrun Presented by Rajkumar Parthasarathy and Sulen Thomas
Overview • Introduction • Markov Localization • Monte Carlo Localization • Experimental results • Simulation Experiments • Conclusions and future work
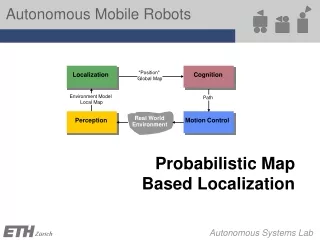
A Fundamental problem of mobile robotics ! Divided into two sub-tasks Global Position Estimation Ability to determine the robot’s position in an a priori or a given frame of reference. Local Position Tracking Ability to keep track of the robot over time after global position estimation. Localization
Collaborative Multi-Robot Localization ? • Combines sensor information from different robotic platforms. • Particularly striking for heterogeneous robot teams.
A Collaborative effort achieves: • Higher levels of accuracy. • Faster localization. • Improved performance with lesser data. • Remarkable reduction in equipment costs.
Approaches Based on the representation of state space, • Kalman filter-based techniques • Topological Markov Localization • Grid-based Markov localization • Multi-robot Markov Localization • Monte Carlo Localization method
D a t a Let N - > number of robots , dn - > data collected by a robot n Three types of dn : • Odometric measurement (a) – change in relative position • Environmental measurement (o) – position of the robot relative to the environment • Detections (r) – information about the presence of other robots
M a r k o v L o c a l i z a t i o n • Concept – to compute a probability distribution over all possible locations in a particular environment • Addresses the problem of state estimation from sensor data • Can be used to solve the localization problem in both the single and multi-robot scenarios
S i n g l e R o b o t L o c a l i z a t i o n • Key idea – each robot is said to maintain a ‘ Belief ’ about its position. The belief of the nth robot at a time t is given by belief Beln(t) (L) where L -> three dimensional random variable of the form (x, y, θ) • Now the belief can be initialized by a uniform distribution Beln(t)(L) = P ( Ln(t) | dn(t) ) where dn(t) -> denotes the data collected by the nth robot at a time t
S i n g l e R o b o t L o c a l i z a t i o n • Case 1 : if dn(t) is an environment measurement o The Markov assumption for a robot at a location l is given by α P( on)|Ln= l) Beln (L = l) where α => normalizer that does not depend on the robot location P (on)|Ln= l) => the environment perception model.
S i n g l e R o b o t L o c a l i z a t i o n • Case 2 : if dn(t) is an odometric measurement (a) The Markov assumption for a robot at a location (l) can be given by ∫ P ( l |an, l' ) Be ln (l') dl‘ where l => original location of robot and l’ => new location moved to P ( l | an, l’) => motion model of the robot n
M u l t i - R o b o t L o c a l i z a t i o n • Case 3 : if dn(t) is a detection (r) The Markov assumption when a robot n is detected by another robot m can be given by Beln(l) Be ln(l) ∫ P(Ln= l | Lm= l', rm) Be lm(l')dl' where rm => the detection variable dn(t)
R u l e s • This approach does not take into consideration negative sights • One robot cannot detect a robot more than once until it has move a pre defined distance
Monte Carlo Localization Alternatively known as • Bootstrap filter • Monte Carlo filter • Condensation Algorithm • Survival of the fittest algorithm Generically grouped togetherasparticle filters
Monte Carlo Localization (SIR) • Version of Markov Localization • Sampling based approach to approximate probability distributions. • Ability to represent arbitrary distributions • Computationally very efficient.
Monte Carlo Localization • Represent the posterior beliefs Beln(l) by a set of Nweighted, random samplesor particles S. S = { Si| i= 1 … N } • A sample set constitutes a discrete approximation of probability distribution. Si = <li , pi > where li = <xi, yi , θ> denotes robot position, pi ≥0 is the numerical weighting factor. for Consistency, ∑n=1..N pi = 1.
Robot Motion • Basically, MCL generates N samples initially. • For each robot motion ∆ do: • Sampling: Generate from each sample in St-1,a new sample according to motion model. li ← li + ∆' • The new sample’s l is generated by generating a single random sample from P( l | l‘ , a) wherea is action observed. • The pvalue of this sample is N-1.
Sensor Readings For each Observation S do: • Importance Sampling : Re-weighting each sample in the sample set with likelihood. p α P ( s|l) where sis the sensor measurement, α is the normalization constant. • Re-sampling : Draw Nsamples from sampleset St according to their likelihood.
Adaptive Sample Set Sizes • Number of samples vary drastically to requirement. • Global localization requires more samples than Position tracking. • MCL determines sample size on-the-fly. • Incorporates p(l)and P(l |s),the before and after sensing belief to determine sample sets.
MCL Properties • Based on Particle filters or Sampling/Importance Re-sampling. • Reduces Computational Overhead. • The quality of solution increases over time. • Sampling is done only when necessary or in proportion to likelihood. • Achieves significantly more accurate results than Markov Localization.
Robot Detection • Camera Image of robot Robin passing Marion as seen from Marion. • Laser Scan of Marionshowing Robin’s position in an angular fashion.
Multi-Robot MCL • The extension of MCL to collaborative multi-robot localization is not straightforward. • Factorial representation of Beliefs are used. L = L1× L2 × L3 × … × LN where each robot maintains its local sample set. • Need for a synchronization interface arises.
Probabilistic Detection Model • Sample sets across different robotic platforms are synchronized in accordance to incremental update equation. Beln(l) ← Beln(l) ∫ P (Ln=l |Lm= l ') Belm(l ') dl ‘ • Beln(l) and Belm(l ) are drawn randomly. • Need to transform sample sets to density trees which grows recursively. • Density values are multiplied with every individual sample <l, p> of the detected robot.
Multi Robot Localization • Map of the environment with the sample set, An equal distribution of uncertainty initially. • Approximation done using density trees. More the samples finer the tree.
S i m u l a t i o n s Simulations were done with two test cases Case 1 : Homogenous robots task : Global localization – ultrasound sensors
S i m u l a t i o n s • Case 2 : Heterogeneous robots Task : Global localization – sonar sensors and laser range finders collaborative approach to localization efficient
R e l a t e d W o r k • Most of the research is in the area of single robot localization. • Majority based on the positive tracking phenomenon • Mostly help to solve the odometric errors in multi-robots
A d v a n t a g e s • Global localization - knowledge of initial position not required - robust and can recover from localization failures • Authors approach - more universally applicable - uses raw sensor data to achieve greater accuracy
C h a l l e n g e s • Only positive detections considered • Proper identification of robots needed to reduce complexity • Approach of active localization to be applied • Reduction of the false detection percentage • Integration when confident of position
C o n c l u s i o n • Statistical method for collaborative multi-robot localization. • Implementation of the Markov, MCL and Detection based schemes • Experiments using real and simulated robots to prove efficiency