Download
1 / 18
180 likes | 282 Views
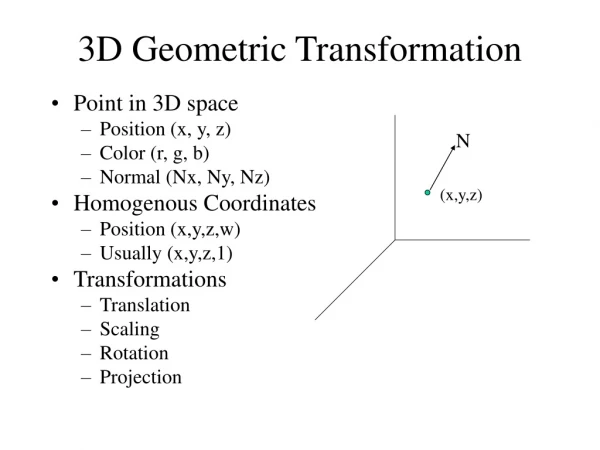
Assembling Virtual Pots from 3D Measurements of their Fragments (Geometric Learning). BROWN UNIVERSITY The SHAPE Lab

E N D
Assembling Virtual Pots from 3D Measurements of their Fragments(Geometric Learning) BROWN UNIVERSITY The SHAPE Lab Andrew Willis, Frederic F. Leymarie, Stuart Andrews, Jill Baker, Yan Cao, Dongjin Han, Kongbin Kang, Weixin Kong, Xavier Orriols, Senem Velipasalar, Eileen L. Vote, David B. Cooper, Martha S. Joukowsky, Benjamin B. Kimia, David H. Laidlaw, David Mumford
Three Sherd Configurationfor a contemporary (experimental ground-truth) pot
Literature Review • Technical University of Vienna (2000-01) • Middle East Technical University of Ankara (1999) • Digital Forma Urbis Romae (2001) • University of Athens (2001) • IBM Pietà Project (1999)
Parameter Estimation Method Assembly using only the geometry of the sherd outside surface. Sherd i Geometric Characterization Break Curve Axis of Symmetry Profile Curve Symbol βi li αi
d d Sherd Break Curve Data Extraction • Vertex Extraction (currently done using HCI). • Break Curve data points are extracted in the vicinity of each vertex. For V vertices there exist 2V break curves. Each break curve is a set of 5 3D points. Transformation Estimation Objective Function
Break Curve Matching 2 2’ 1 T9 4 9 T5 4’ 3’ 5 3
Axis Equation: Profile Curve Equation: Axis and Profile Curve Estimation z αi (z)
Probabilistic Framework The estimated parameters for each sherd alone are used for reconstruction. The parameters are combined to form a maximum likelihood estimate (MLE) of the global pot geometry.
Pot Assembly Search Algorithm 1. Obtain Break curve data, and Axis, Profile Curves estimate for each sherd (computationally costly). 2. For each pair of sherds, estimate all possible alignments by matching break curve data (fast). Each alignment constitutes a configuration. (for 200 sherds typically 1.5 minutes) 3. For each configuration, improve the alignment using joint (break curve , axis & profile) estimation (computationally costly). 4. Find configurations which may be merged with other configurations or single sherds (computationally costly). 5. Continue from step 3. Steps 3-5 operate along contours of constant probability starting at the maximum.
Additional Considerations Within this framework can include other geometric features. • Bayesian formulation and search is expected to handle more than one pot in the data set, missing sherds for a pot, and extraneous sherds not associated with any of the pots. • Thickness curve • Patterns on inside surface • Sherd Erosion • Color / Patterns on surface • Commonality with observed methods • Prior knowledge of global shape may be incorporated to simplify the search • Theoretically possible to assemble a virtual pot where no sherds share common break curves.
Conclusions • Extend to similar more complex geometries • Refinement of search and estimation algorithms. • Applications to large structures