Download
1 / 29
290 likes | 440 Views
Smart Laser-Tracking for Human-Machine Interface. Á lvaro Cassinelli, St é phane Perrin, Masatoshi Ishikawa Ishikawa-Namiki-Laboratory Parallel Processing for Sensory information University of Tokyo . Today’s approach. UI : “WIMP” + alphanumeric input

E N D
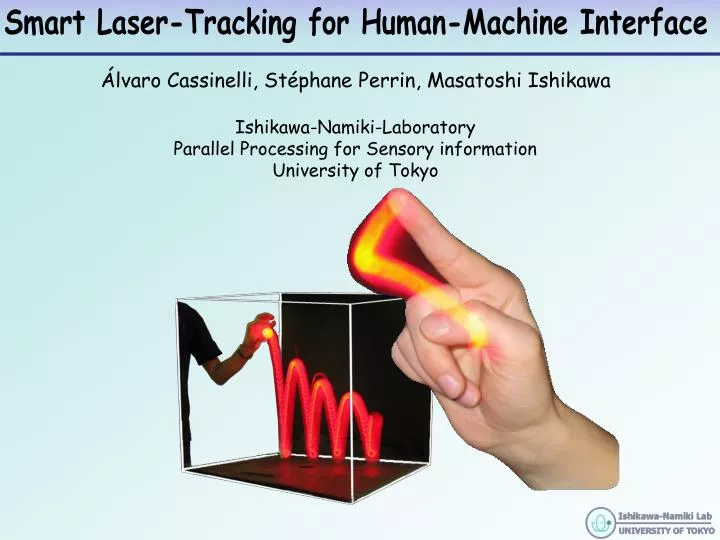
Smart Laser-Tracking for Human-Machine Interface Álvaro Cassinelli, Stéphane Perrin, Masatoshi Ishikawa Ishikawa-Namiki-Laboratory Parallel Processing for Sensory information University of Tokyo
Today’s approach UI : “WIMP” + alphanumeric input I/O Device: touch sensitive screen+stylus Input and interaction with “ever-shrinking” portable electronic devices physical interaction …Next step ? • remove the need for any physical I/O space at all • remove the need of any additional input device I. The problem: nice: input space is merged with viewing space ”ergonomics-independent” miniaturization (*) windows, icons, menus and pointer
...By providing the PDA with intelligent sight: - hand/finger position - handwritten character recognition • gestures recognition, etc Low, medium or high-level vision drawbacks: • May require intensive computation • Not robust enough • Sensitive to external illumination conditions/backgrounds... In a word: passive-vision input versatile but not mature yet… …in any case overkill for the problem at hand! (“inputspace-less” WIMP) How to remove the input space? (non-invasive techniques!)
what a short-sighted PDA would actually see… proximity sensor... + ...angular information should provide sufficient data for tracking! animal antenna cane for the blind Closer look at the problem... • Hand/finger closer than anything else • fingertip always visible (no occlusion) • fingertip “shape” simple and stable cost-efficient, ROBUST, FAST! …but cumbersome, annoying?
And... - laser can be used as output device (on any external surface, including the retina: VRD) The proposed “antenna”: a directive beam of light advantages: - active lighting: provides and control illumination - real-time, precise 3D measures (telemetry) - measurement of surface roughness, speed, even biometric data. Inconvenients: no haptic feedback (just like passive vision, but visual cues possible).
VERY! Thanks to today’s “MOEMS” technology... The realm of “MOEMS” (micro-opto-electro-mechanical systems): Electronic circuit, photodetectors, laser diodes sources and mirrors integrated in the SAME chip. ... but how realistic is the integration of a LASER RADAR on a PDA?
Hardware (discrete components): • laser diode, • a pair of steering micro-mirrors, • single non-imaging photodetector. II. Smart Laser Scanner Prototype
smart laser scanner: laser excursion is locked around the area of interest circular laser “saccade” Tracking sequence repeated every millisecond. kHz refreshing rate explains algorithmic extreme simplicity Tracking Principle
2 DOF (using fingertip) (angular precision: better than tenth of a degree)
3 DOF (using fingertip) Depth precision: (intensity based) around 1cm up to 2 m
Simultaneous tracking (up to four targets without hardware duplication)
UIs based on this 3D Input Device: Proof-of-principle examples
3D locator X/Y/Z translation Gestural command: RIGTH CLICK LEFT CLICK
Interface for visualizing 2D data Positional command: X/Y translation ZOOM (+) Gestural command: ZOOM (-) LEFT CLICK RIGHT CLICK
Visualization interface for video Positional command: X/Y translation Frame position (+) Gestural command: Frame position (-) Zoom x2 Zoom /2
Proposed solution: use laser “light antennas” to track one (or more) fingers. • Advantages: • fast (no image processing), • precise 3D measurements, • insensitive to external light conditions, • no markers necessary, • can be used as output device. Conclusion The problem: design a 3D input device that does not interfere with technological miniaturization
MOEMS integration: PDA on a keychain, PDA on a chest-pin: touching the pin or activates tracking, a gesture can be used to ask for emails, and these are read on the hand... Further Work Study of adaptive saccade shapes (ex: follows the hand contour) Prototype without mobile parts, using multiple laser beams...
Speed (3m/s) Precision (cm) multi-tracking (up to four fingers) see more at both #102 Interactive laser annotation ACR - 5.4.2005