Download
1 / 41
420 likes | 540 Views
Data Center Transport Mechanisms. Balaji Prabhakar Departments of Electrical Engineering and Computer Science Stanford University. Joint work with: Mohammad Alizadeh, Berk Atikoglu and Abdul Kabbani, Stanford University Ashvin Lakshmikantha, Broadcom Rong Pan, Cisco Systems

E N D
Data Center Transport Mechanisms Balaji Prabhakar Departments of Electrical Engineering and Computer Science Stanford University Joint work with: Mohammad Alizadeh, Berk Atikoglu and Abdul Kabbani, Stanford University Ashvin Lakshmikantha, Broadcom Rong Pan, Cisco Systems Mick Seaman, Chair, Security Group; Ex-Chair, Interworking Group, IEEE 802.1
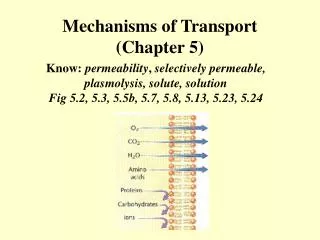
What are Data Centers? • Large enterprise networks; convergence of • High speed LANs: 10, 40, 100 Gbps Ethernet • Storage networks: Fibre Channel, Infiniband • Related idea: Cloud Computing • Outgrowth of high-performance computing networks with integrated storage and server virtualization support • Driven by • Economics: One network, not many • Low capex and opex • Economics: Server utilization • Resource pooling, virtualization, server migration, high-speed interconnect fabrics • Savings in power consumption • Unified management of network of servers allows server and job scheduling • Security • Storage and processing of data within a single autonomous domain
Overview of a Data Center N-Tiers of Servers (Web, App, Database) Front End Networks (Security & Load Balancing) DataStorage • Large networks of servers, storage arrays, connected by a high-performance network • Origins • Clusters of web servers • Web hosting • High performance computing: Cloud computing • Servers, storage FC Firewall VPN Disk and Tape IDS IP Load Balancing • Key drivers • Convergence of Layer 2 neworks • Swtiched Ethernet (LANs) and Storage Area Networks (SANs): FCoE • Server virtualization • VMs, VM migration NAS & File Storage IB Data Center
Rest of the Talk • A brief overview of the relevant congestion control background • A description of the QCN algorithm and its performance • The Averaging Principle: A control-theoretic idea underlying the QCN and BIC-TCP algorithms which stabilizes them when loop delays increase; very useful for operating high-speed links with shallow buffers---the situation in 10+ Gbps Ethernets
Why do Congestion Control? • Congestion: Transient: Due to random fluctuations in packet arrival rate • Handled by buffering packets, pausing links (IEEE 802.1bb) Sustained: When link bandwidth suddenly drops or when new flows arrive • Switches signal sources to reduce their sending rate: IEEE 802.1Qau • Congestion control algorithms aim to • Deliver high throughput, maintain low latencies/backlogs, be fair to all flows, be simple to implement and easy to deploy • Congestion control in the Internet: Rich history of algorithm development, control-theoretic analysis, deployment • Jacobson, Floyd et al, Kelly et al, Low et al, Srikant et al, Misra et al, Katabi, Paganini, et al
A main issue: Stability • Stability of control loop • Refers to the non-oscillatory behavior of congestion control loops • If the switch buffers are short, oscillating queues can overflow (and drop packets) or underflow (lose utilization) • In either case, links cannot be fully utilized, throughput is lost, flow transfers take longer
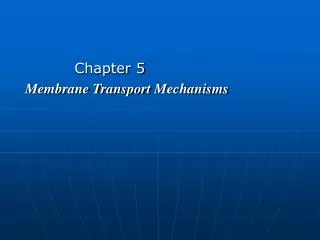
TCP--RED: A basic control loop TCP TCP TCP TCP p qavg minth maxth RED: Drop probability, p, increases as the congestion level goes up TCP: Slow start + Congestion avoidance Congestion avoidance: AIMD No loss: increase window by 1; Pkt loss: cut window by half
TCP Dynamics Cwnd Congestion Window ~ Rate Cwnd/2 Time Congestion message recd
TCP--RED: Analytical model 1/R C - q - Time Delay p TCP Control RED Control
TCP--RED: Analytical model Users: Network: W: window size; RTT: round trip time; C: link capacity q: queue length; qa: ave queue length p: drop probability *By V. Misra, W. Dong and D. Towsley at SIGCOMM 2000 *Fluid model concept originated by F. Kelly, A. Maullo and D. Tan at Jour. Oper. Res. Society, 1998
TCP--RED: Stability analysis • Given the differential equations, in principle, one can figure out whether the TCP--RED control loop is stable • However, the differential equations are very complicated • 3rd or 4th order, nonlinear, with delays • There is no general theory, specific case treatments exist • “Linearize and analyze” • Linearize equations around the (unique) operating point • Analyze resultant linear, delay-differential equations using Nyquist or Bode theory • End result: • Design stable control loops • Determine stability conditions (RTT limits, number of users, etc) • Obtain control loop parameters: gains, drop functions, …
Instability of TCP--RED • As the bandwidth-delay-product increases, the TCP--RED control loop becomes unstable • Parameters: 50 sources, link capacity = 9000 pkts/sec, TCP--RED • Source: S. Low et. al. Infocom 2002
Feedback Stabilization • Many congestion control algorithms developed for “high bandwidth-delay product” environments • The two main types of feedback stabilization used are: • Determine lags (round trip times), apply the correct “gains” for the loop to be stable (e.g. FAST, XCP, RCP, HS-TCP) • Include higher order queue derivatives in the congestion information fed back to the source (e.g. REM/PI, XCP, RCP) • We shall see that BIC-TCP and QCN use a different method which we call the Averaging Principle • BIC (or Binary Increase) TCP is due to Rhee et al • It is the default congestion control algorithm in Linux • No control theoretic analysis, until now
Quantized Congestion Notification (QCN): Congestion control for Ethernet
Ethernet vs. the Internet • Some significant differences … • No per-packet acks in Ethernet, unlike in the Internet • Not possible to know round trip time or lags! • So congestion must be signaled to the source by switches • Algorithm not automatically self-clocked (like TCP) • Links can be paused; i.e. packets may not be dropped • No sequence numbering of L2 packets • Sources do not start transmission gently (like TCP slow-start); they can potentially come on at the full line rate of 10Gbps • Ethernet switch buffers are much smaller than router buffers (100s of KBs vs 100s of MBs) • Most importantly, algorithm should be simple enough to be implemented completely in hardware • Note: QCN has Internet relatives---BIC-TCP at the source and the REM/PI controllers
Data Center Ethernet Bridging:IEEE 802.1Qau Standard • A summary of standards effort • Everybody should do it at least once • Like proving limit theorems in Probability • But, in this case, no more than once!? • Intense, fun activity • Broadcom, Brocade, Cisco, Fujitsu, HP, Huawei, IBM, Intel, NEC, Nortel, … • Conference calls every Thursday morning • Meeting every 6 weeks (Interim and Plenary) • Real-time engineering: Tear and re-build • Our algorithm was the 4th to be proposed • It underwent 5—6 revisions because of being “subjected to constraints” • Draft of standard: 9 revs
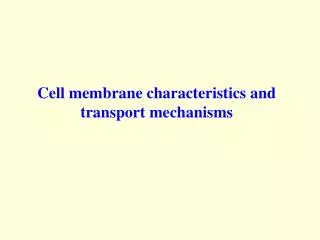
QCN Source Dynamics TR Target Rate CR Rd/8 Rd/4 Rd Rate Rd/2 Current Rate Time Congestion message recd TCP – AIMD Rate BIC-TCP and QCN Congestion message recd Time
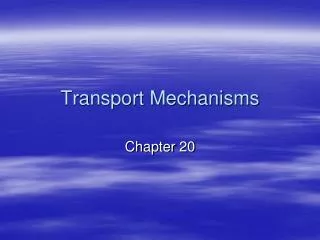
Stability: AIMD vs QCN AIMD QCN RTT = 50 μs RTT = 300 μs
Experiment & Simulation Parameters • Baseline scenario • Output-queued switch • OG hotspot; hotspot severity: 0.2Gbps, hotspot duration ~3.5sec • Vary RTT: 100us to 1000us 0.95 G 0.95 G NIC 1 0.2 G NIC 2
1 source, RTT = 100μs Hardware OMNET++
1 source, RTT = 1ms Hardware OMNET++
8 sources, RTT = 1ms Hardware OMNET++
Fluid Model for QCN P = Φ(Fb) • Assume N flows pass through a single queue at a switch. State variables are TRi(t), CRi(t), q(t), p(t). 10% Fb 63
QCN Notes • The algorithm has been extensively tested in deployment scenarios of interest • Esp. interoperability with link-level PAUSE and TCP • All presentations and p-code are available at the IEEE 802.1 website: http://www.ieee802.org/1/pages/dcbridges.html http://www.ieee802.org/1/files/public/docs2008/au-rong-qcn-serial-haipseudo-code%20rev2.0.pdf • The theoretical development is interesting, but most notably because QCN and BIC-TCP display strong stability in the face of increasing lags, or, equivalently in high bandwidth-delay product networks • While attempting to understand the unusually good performance of these schemes, we uncovered a method for improving the stability of any congestion control scheme
The Averaging Principle (AP) • A source in a congestion control loop is instructed by the network to decrease or increase its sending rate (randomly) periodically • AP: a source obeys the network whenever instructed to change rate, and then voluntarily performs averaging as below TR = Target Rate CR = Current Rate
A Generic Control Example • As an example, we consider the plant transfer function: P(s) = (s+1)/(s3+1.6s2+0.8s+0.6)
Step Response Two-step AP, Delay = 25 seconds Two-step AP is even more stable than Basic AP
Applying AP to RCP (Rate Control Protocol)RCP due to Dukkipatti and McKeown • Basic idea: Network computes max-min flow rates for each flow. • Rate computed every 10 msecs • Flows send at their advertised rate • Apply the AP to RCP
AP-RCP Stability RTT = 60 msec RTT = 65 msec
AP-RCP Stability cont’d RTT = 120 msec RTT = 130 msec
AP-RCP Stability cont’d RTT = 230 msec RTT = 240 msec
Understanding the AP • As mentioned earlier, the two major flavors of feedback compensation are: • Determine lags, chose appropriate gains • Feedback higher derivatives of state • We prove that the AP is sense equivalent to both of the above! • This is great because we don’t need to change network routers and switches • And the AP is really very easy to apply; no lag-dependent optimizations of gain parameters needed
AP Equivalence Source does AP Fb Regular source 0.5 Fb + 0.25 T dFb/dt • Systems 1 and 2 are discrete-time models for an AP enabled source, and a regular source respectively. • Theorem: Systems 1 and 2 are algebraically equivalent. That is, given identical input sequences, they produce identical output sequences.
Conclusions • We have seen the background, development and analysis of a congestion control scheme for the IEEE 802.1 Ethernet standard • The QCN algorithm is • More stable with respect to control loop delays • Requires much smaller buffers than TCP • Easy to build in hardware • The Averaging Principle is interesting; we’re exploring its use in nonlinear control systems