Download
1 / 8
80 likes | 193 Views
TigerBot Computer Design. Jonathan Cormier (CE), John Seybold (CE ), Jeremy Jensen (ME ), Eric Walkama (ME), Kyle Backer (EE), Matthew DeCapua ( EE ), Mike Thomas (EE), . Customer Needs. CE Specifications. Risks. Controller. System Control Design.

E N D
TigerBotComputer Design Jonathan Cormier (CE), John Seybold (CE), Jeremy Jensen (ME), Eric Walkama (ME), Kyle Backer (EE), Matthew DeCapua (EE), Mike Thomas (EE),
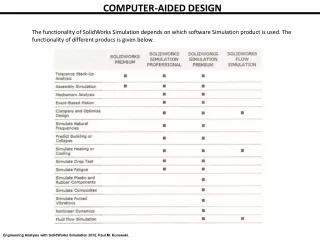
ROS (Robot Operating System) provides libraries and tools to help software developers create robot applications. It provides hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and more. ROS is licensed under an open source, BSD license. Software Platform
Main loop functions by performing a command, then checking sensors for new information. • Main loop wont wait on sensors, will instead pull recent data. • Separate process thread will be used to poll sensors and put the data in a shared memory region. Logic Flow