Download
1 / 30
310 likes | 367 Views
This research focuses on controlling two-phase flow in risers using feedback linearization. The study presents two solutions: state estimation with feedback and output linearization. Experimental results show limitations with measuring subsea pressures and the effectiveness of feedback linearization. The study also introduces a novel control approach without an observer that stabilizes the system up to 60%. The research provides insights into controllability limitations and the potential for improved control strategies in two-phase flow systems.

E N D
Nonlinear model-based control of two-phase flow in risers by feedback linearization Esmaeil Jahanshahi, Sigurd Skogestad, Esten I. Grøtli Norwegian University of Science & Technology (NTNU) 9th IFAC Symposium on Nonlinear Control Systems – September 4th 2013, Toulouse
Outline • Introduction • Motivation • Modeling • Solution 1: State estimation & state feedback • Solution 2: Output linearization • Experimental results • Controllability limitation
Introduction * figure from Statoil
Slug cycle (stable limit cycle) Experiments performed by the Multiphase Laboratory, NTNU
Introduction • Anti-slug solutions • Conventional Solutions: • Choking (reduces the production) • Design change (costly) : Full separation, Slug catcher • Automatic control: The aim is non-oscillatory flow regime together with the maximum possible choke opening to have the maximum production
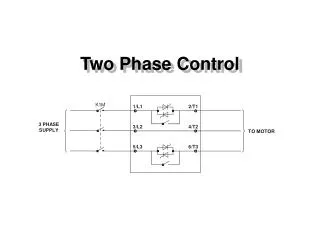
Pt,s PC uz PT Motivation Problem 1: Nonlinearity Additional Problem 2: Unstable zero dynamics (RHP-zero) for topside pressure
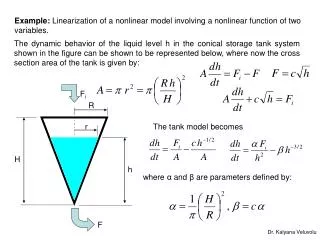
Modeling: Simplified 4-state model Choke valve with opening Z x3, P2,VG2, ρG2 , HLT P0 wmix,out L3 x1, P1,VG1, ρG1, HL1 x4 L2 h>hc wG,lp=0 wL,in wG,in w x2 wL,lp h L1 hc θ State equations (mass conservations law):
Experiments 3m
Bifurcation diagrams Experiment Subsea pressure Top pressure Gain = slope
Nonlinear observer K State variables PT Solution 1: observer & state feedback uc uc Pt
State Feedback Kc : a linear optimal controller calculated by solving Riccati equation Ki : a small integral gain (e.g. Ki = 10−3)
Experiment High-gain observer – top pressure measurement: topside pressurevalve opening: 20 %
Fundamental limitation – top pressure Measuring topside pressure we can stabilize the system only in a limited range RHP-zero dynamics of top pressure
Experiment High-gain observer – subsea pressure measurement: topside pressurevalve opening: 20 % Not working ??!
Chain of Integrators • Fast nonlinear observer using subsea pressure: Not Working??! • Fast nonlinear observer (High-gain) acts like a differentiator • Pipeline-riser system is a chain of integrator • Measuring top pressure and estimating subsea pressure is differentiating • Measuring subsea pressure and estimating top pressure is integrating
Nonlinear controller PT PT Solution 2: feedback linearization Prt uc
Pipeline subsystem ISS Hypothesis 1. The Pipeline subsystem with the riser-base pressure, Prb, as its input is “input-to-state stable”.
Stability of cascade system Riser Proposition 2. Let hypothesis 1 holds. If the Riser subsystem becomes globally asymptotically stable under a stabilizing feedback control, then the pipeline-riser system is globally asymptotically stable. Proof : We use conditions for stability of the cascaded systems as stated by Corollary 10.5.3 of Isidori (1999).
Stabilizing controller for riser subsys. Riser dynamics: System equations in y coordinates:
Stabilizing controller for riser subsys. exist and are continuously differentiable. is a diffeomorphism on
Stabilizing controller for riser subsys. System in normal form: Feedback controller: (1) Reduces to . By choosing , we get exponentially stable
Stabilizing controller for riser subsys. If we insert the control law into (2) we get exponentially fast, Since , K1is bounded and will remain bounded. This is partial exponential stabilization of the system with respects to . (Vorotnikov (1997))
Stabilizing controller for riser subsys. Final control law by linearizing y1 dynamics, equation (1): In the same way by linearizing y2 dynamics, equation (2): Control signal to valve: y2 is non-minimum phase
Experiment CV: riser-base pressure (y1), Z=30%
Experiment CV: riser-base pressure (y1), Z=60% Gain:
Experiment CV: topside pressure (y2), Z=20% y2 is non-minimum phase
Conclusions • Nonlinear observers work only when measuring topside pressure • This works in a limited range (valve opening of 20%) • Nonlinear observers fail when measuring subsea pressure • New controller (without observer) stabilizes system up to 60% • World record (on our experiment)! Tie with gain-scheduled IMC • But cannot bypass fundamental limitations: • non-minimum-phase system for topside pressure • Small gain of system for large valve openings Thank you!