Download
1 / 26
310 likes | 431 Views
Feedback(Exact) Linearization. Motivation. pendulum. Feedback linearizable system. Advantages The nonlinear control reduces the system to a linear one (exactly). The nonlinear control results in global asymptotically stability of the resulting linear behavior. Disadvantages

E N D
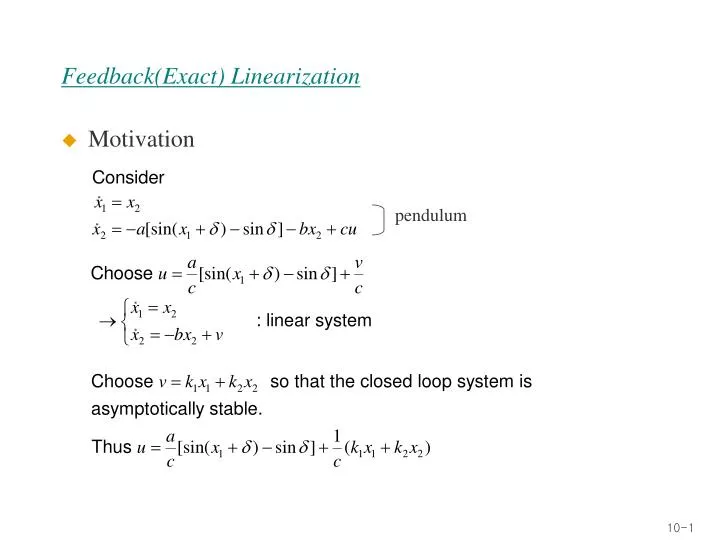
Feedback(Exact) Linearization • Motivation pendulum
Feedback linearizable system • Advantages • The nonlinear control reduces the system to a linear one (exactly). • The nonlinear control results in global asymptotically stability of the resulting linear behavior. • Disadvantages • The real system might be different from the nominal system. Thus the behavior might be nonlinear. • Not every system can be treated this way. • Feedback linearizable system
Feedback linearizable system (Continued) Thus the feedback linearizable systems are of the form : (1) Choose Ex: Is it of the form (1) ? Introduce
Diffeomorphism Definition: (1) (2)
Calculation of T(·) Also (3)
Calculation of T(·) (Continued) • Two PDEs are the necessary & sufficient conditions for feedback linearization. • T is not unique
(5) Calculation of T(·) (Continued) (4)
Example Ex:
+ _ linearization loop pole-placement Closed-loop system Closed-loop system under feedback(exact) linearization
Input-Output Linearization Let’s consider the tracking problem where and its derivative upto a sufficiently high order are assumed to be known and bounded. Objective : To make tracks while keeping the whole state bounded. An apparent difficulty with this system is that the output is only indirectly related to the input through the state variable and the nonlinear state equation. One might guess that the difficulty of the tracking control design can be reduced if we can find a direct and simple relation between the system output and the control input
Example Ex: Let’s differentiate the output (1) (2) where (2) represents an explicit relationship between and Choose (3) where is a new input to be determined.
Example (Continued) Then Let , then choosing the new input as (where are positive) Then the tracking error of closed loop is (4) which represents an exponentially stable error dynamics. Note : (i) The control law is defined everywhere except that (ii) Full state measurement is necessary in implementing the control law because (3) requires the value of One must remember that (4) only accounts for part of the closed loop dynamics, because it has only order 2, while the whole dynamics has order 3. Thus, a part of the system dynamics has been rendered unobservable in the input-output linearization. We call it internal dynamics.
Example (Continued) For the above example, the internal dynamics is represented by If this internal dynamics is stable (by which we actually mean stability in BIBO), our tracking control problem has indeed been solved. Otherwise, it will end up with burning-up fuses or violent vibration of mechanical members Therefore, the effectiveness of the above control design, based on the reduced order model, hinges upon the stability of the internal dynamics.
Example Ex: Assume that the control objective is to make track Since we know we choose the control law (1) (2) Then The same control input is applied to the second equation leading to the internal dynamics We know that is guaranteed to be bounded by (2) and is assumed to be bounded. Then
Example (Continued) Thus we conclude that since when when Therefore (1) represents a satisfactory tracking control law. If we need to differentiate the output times to generate an explicit relationship between the output and the input , the system is said to have relative degree . If the relative degree of a system is the same as its order, then there is no internal dynamics. In this case, input-output linearization leads to input-state linearization and output tracking can be achieved easily.