Download
1 / 32
600 likes | 1.16k Views
Underwater Sensor Networks: Applications and Challenges. Jun-Hong Cui Computer Science & Engineering University of Connecticut. Why Underwater?. The Earth is a water planet About 2/3 of the Earth covered by oceans Uninhabited, largely unexplored

E N D
Underwater Sensor Networks:Applications and Challenges Jun-Hong Cui Computer Science & Engineering University of Connecticut
Why Underwater? • The Earth is a water planet • About 2/3 of the Earth covered by oceans • Uninhabited, largely unexplored • A huge amount of (natural) resources to discover • Many potential applications • Long-term aquatic monitoring • Oceanography, marine biology, deep-sea archaeology, seismic predictions, pollution detection, oil/gas field monitoring … • Short-term aquatic exploration • Underwater natural resource discovery, hurricane disaster recovery, anti-submarine mission, loss treasure discovery …
What are the Application Requirements? • Desired properties • Unmanned underwater exploration • Localized and precise data acquisition for better knowledge • Tetherless underwater networking for motion agility/flexibility • Scalable to 100’s, 1000’s of nodes for bigger spatial coverage
The Ideal Technique: Underwater Sensor Networks (UWSNs)
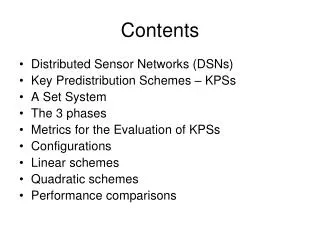
Radio Buoys Data Report Acoustic Sonar Transmitter Application Scenario I Submarine Detection
Why UWSN for Submarine Detection? • Existing Approaches • Active or passive sonar • Cons: submarine anti-detection techniques (e.g., sonar absorption) make them less-effective • Using UWSN • Collaborative detection • Multiple sensors, and/or multi-modal data • Large coverage • Timely reporting • High reusability
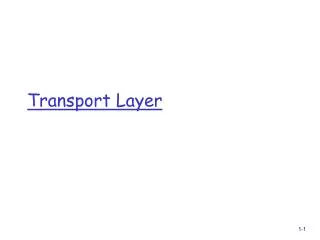
Application Scenario II Estuary Monitoring Fresh Fresh Water Current Buoyancy Control Buoyancy Control Salty Water Current Salty
Why UWSN for Estuary Monitoring? • Existing Approaches • Ship tethered with chains of sensors moves from one end to the other • Cons: no 4D data, either f(x, y, z, fixed t), or f(fixed (x, y, z), t); and cost is high • Using UWSN • Easily get 4D data, f(x, y, z, t), sensors move • Reduce cost significantly • Increase coverage • Have high reusability
Research Issues (I) • Sensor node system design • Sensing, computing, communication integration • Power management: energy saving, life time • Autonomous network system design • Communication, multiple access • Routing, forwarding, reliable transfer • Localization, synchronization • Security, robustness • Energy efficiency
Research Issues (II) • Applications and data management • Application classification & characterization • Data sampling, structure, storage • Collaborative estimation & detection • Data fusion, dissemination, tracking • Modeling, simulation, evaluation • Network simulator • Sensor node simulator • Hardware, middleware, software design
Research Personnel • Sensor Network and Systems research • Jun-Hong Cui, Computer Science & Engineering (Director) • Yunsi Fei, Electrical & Computer Engineering • Jerry Zhijie Shi, Computer Science & Engineering • Bing Wang, Computer Science & Engineering • Peter Willett, Electrical & Computer Engineering • Shengli Zhou, Electrical & Computer Engineering (Co-director) • Algorithmic and Performance support • Reda Ammar, Computer Science & Engineering • Lanbo Liu, Civil & Environmental Engineering • Sanguthevar Rajasekaran, Computer Science & Engineering • Context and Applications consultation • Amvrossios Bagtzoglou, Civil & Environmental Engineering • Thomas Torgersen, Marine Sciences
UWSN Lab @ UCONN http://uwsn.engr.uconn.edu/
Underwater Transmission Characteristics • Narrow bandwidth channels • High-frequency waves rapidly absorbed by water radio not applicable in water • Must use acoustic channels - low bandwidth, fading • High attenuation • Bandwidth X Range product = 40 Kbps x Km • Very low compared to RF channels (1:100) • 802.11b/a/g yields up to 5Mbps x Km • Very slow acoustic signal propagation • 1.5x103 m / sec vs. 3x108 m / sec • Causes large propagation delay
State-of-Art Underwater Acoustics Courtesy: Kilfoyle & Baggeroer
Research Challenges • UnderWater Acoustic (UW-A) channel: • Narrow band: hundreds of kHZ at most • Huge propagation latency • High channel error rate • Random topology and sensor node mobility(1--1.5m/s due to water current) • Existing protocols in terrestrial sensor networks assume stationary sensor nodes; • In mobile sensor networks, these protocols weakened • Mobility & UW-A channel limitations open the door to very challenging networking issues
UWSN Protocol Stack • UWSNs must require: • Reliable data transfer (tolerating high error-prone acoustic channels) • Efficient data delivery (should be energy-efficient) • Localization (for geo-routing or meaningful data) • Time synchronization (for sleep cycle schedule, multiple access protocol schedule, etc) • Efficient multiple access (sensors are densely deployed) • Design Objective: • Build efficient, reliable, and scalableUWSNs
Reliable Data Transfer • TCP like end-to-end approach does not work • Large propagation delay large end-to-end delay large bandwidth x delay product • High error-prone acoustic channels high loss rate • Pure ARQ type (hop-by-hop) does not work well • Performance degraded because of frequent ACKs • Possible solutions: • FEC-based hop-by-hop approach with infrequent ACKs • Have obtained some initial results • Network coding utilizing multiple paths for robustness • Have started investigation on this
Efficient Multi-Hop Routing • Existing routing protocols in terrestrial WSNs do not work well in UWSNs • Node mobility changes node neighborhood • Directed diffusion requires too frequent route enforcement • Existing routing protocols in terrestrial ad-hoc networks do not work well in UWSNs • Proactive: too much overhead to maintain updated topo • Passive: flooding is not efficient, also causes contention • Possible solution: location-based routing • VBF: Vector-Based Forwarding (Networking’06) • More work to improve energy efficiency & robustness
Localization & Time-Synchronization • GPS-free and Mobility are main challenges • Existing GPS-free localization & time-sync schemes (range-based & range-free) • Nodes are usually immobile • Multi-hop schemes usually suffer from • Poor precision due to high error probability & dynamic network topologies • Considering underwater GPS-like approach • Using multiple surface reference points • Range-based approaches are possible • Need dedicated devices to measure distances
Efficient Multiple Access • Challenges: Large prop. delay & low bandwidth • Examine existing MAC protocols • Scheduled protocols • TDMA: ? CDMA: ? • FDMA: not feasible due to narrow band • Contention-based protocols • Random access: ALOHA/Slotted ALOHA ? • Carrier sensing access: CSMA (meaningless in UWSN) • Collision avoidance with handshaking: MACA/MACAW ? • Suggested solutions • A cluster architecture: • CDMA between clusters, TDMA inside clusters • An adaptive approach • Exploring random access & handshaking
Acoustic Physical Layer • The key is to increase bandwidth • Current limit: range x rate < 40 kbps x km • Explored approaches: • FSK, PSK, QAM • Advanced technologies to examine • MIMO transmission • Multicarrier communication
Testbed Overview • Equipment List: • Acoustic modem • Underwater speaker • Hydrophone • Sound mixer • Sound receiver • Speaker/microphone • Aquarium
Micro-Modem • Designed and Implemented by WHOI (Woods Hole Oceanographic Institution) • A Low-power Acoustic Modem • Based on the TMS320C5416 DSP from TI
Receivers/Speakers • Control-1 150 Watt Two-Way Loudspeaker System • Good performs in recording studios • Low distortion reproduction • Frequency Range: 70 Hz - 20 kHz • Sony STRDE197 Stereo Receiver • Sennheiser MKE 300 Microphone
Underwater Speakers • Frequency range: 200 Hz to 32 KHz • Directional at higher frequencies • A completely passive, non-powered device • Can be used as an air speaker or a receive hydrophone
Aquarian Hydrophone • Output: • 300mW, short-circuit-proof • 3.5mm (mini) phone jack • Power Requirements: • 7mA quiescent current • Usable Frequency Response: • 20Hz - 100KHz • Polar Response: • Omni directional
Behringer SL2442FXPRO Eurodesk 24-Channel Mixer • Ultra-Pure Sound and Crystal-Clear Audio • 99 special sound effects: • Reverbs • Delays • Tube distortion • And More! • 24 channels • Could simulate different underwater environments
Water Test Setting • Distance between the underwater speaker and hydrophone: 1 meter
Conclusions and Future Work • UWSN • Is a challenging and promising new area • Requires interdisciplinary efforts from • Acoustic communication • Signal processing • Network design • Future Work • A long to-do list … • Conducting research at different layers • reliable transfer, routing, localization, multiple access, acoustic communication, …