Download
1 / 20
200 likes | 280 Views
Adaptive Rigid Multi-region Selection for 3D face recognition K. Chang, K. Bowyer, P. Flynn. Paper presentation Kin-chung (Ryan) Wong 2006/7/27. The ARMS algorithm. ARMS stands for Adaptive Rigid Multi-region Selection The result of first-hand knowledge:

E N D
Adaptive Rigid Multi-region Selectionfor 3D face recognition K. Chang, K. Bowyer, P. Flynn Paper presentation Kin-chung (Ryan) Wong 2006/7/27
The ARMS algorithm • ARMS stands for Adaptive Rigid Multi-region Selection • The result of first-hand knowledge: • Face Recognition Grand Challenge, versions 1 and 2 • Kevin Bowyer, Kyong Chang, Patrick Flynn: the same authors of the Notre Dame survey on 3D and 3D+2D face recognition (2004-2006).
Main objectives • Use 3D shape information alone • Based on state-of-the-art methods • In their survey, Iterative Closest Point (ICP), along with Linear Discriminant Analysis (LDA) are reported as the best performing algorithms for 3D face recognition • Curvatures are used to locate landmark points • Able to handle expressions • Should perform well on FRGC v2
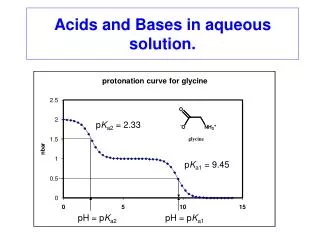
Issues in 3D face recognition • Expressions: small • Even when told to maintain neutral expressions, there will be small movements in 3D face surface. • Expressions: large • Some parts of face are more rigid than others. • Comparing non-rigid 3D facial surfaces across expressions is still an unsolved problem. • Solution: • use rigid parts only • use robust surface registration method
Preprocessing • Face surface is down-sampled to reduce computations with little effect on accuracy • Use skin color detection on 2D image to detect face • Use curvature to segment face surface and detect landmark points • Use landmark points to normalize pose and initialize ICP • Many techniques for preprocessing exist, but these are the more robust ones
Multiple regions and Fusion • Use multiple regions to compute similarity, and combine them later • Use the nose region • Relatively more rigid than the rest of the face • Relatively low probability of occlusions • Perform multiple ICP matches using multiple regions • Match smaller probe surfaces to a larger gallery surface (a practical ICP technique) • Use sum of squared distance (RMS) as dissimilarity measure
Registration • Iterative Closest Point (ICP) is used to register a probe surface to a gallery surface. • Rotates and translates the probe surface to match it with the gallery surface. • Does not deform either surfaces. • Provides good surface registration when facial expressions are present. • Computationally intensive, requires pair-wise matching • Requires good initialization, otherwise it will converge to wrong result
Rules for Fusion • Three fusion rules: • Sum • Product • Minimum
Experiment – algorithms • ICP – baseline • PCA – baseline • Landmark points are manually selected • The whole face is used for matching • ARMS – auto • Landmark points are detected by their algorithm automatically. Used for ROI selection and ICP initialization. • ARMS – manual • Landmark points are selected manually.
Experiment – the dataset • The dataset later becomes part of FRGC v2.0 • Experimentation protocols are different The dataset makes it possible to evaluate: • Neutral expressions vs. non-neutral expressions • Time-lapse between gallery and probe
Results – Fusion 2 regions better than 1, but 3 doesn’t help
Areas for improvement • Use more regions from other parts of face • Examples: chin region • Implicit expression modeling through intra-personal vs. inter-personal spaces • Fusion: beyond sum, product and minimum • Automatic learning (PCA, LDA, SVM) • Committee machine
Areas for improvement • Faster ICP algorithm and implementation • Spatial search technique • Specialized data structure
Interesting side note – invariance • The algorithms for computing mean and Gaussian curvatures are documented in great detail • Their algorithm is Euclidean invariant and involves elements similar to Lin’s summation invariant • Local coordinate transformation • Least square fitting + curvature estimation <=> second order monomial potentials • Preliminary correspondence is being worked out