Download
1 / 61
610 likes | 812 Views
Dynamic Neural Network Control (DNNC): A Non-Conventional Neural Network Model Masoud Nikravesh EECS Department, CS Division BISC Program University of California Berkeley, California Abstract:

E N D
Dynamic Neural Network Control (DNNC): A Non-Conventional Neural Network Model Masoud Nikravesh EECS Department, CS Division BISC Program University of California Berkeley, California Abstract: In this study, Dynamic Neural Network Control methodology for model identification and control of nonlinear processes is presented. The methodology uses several techniques: Dynamic Neural Network Control (DNNC) network structure, neuro-statistical (neural network & non-parametric statistical technique such as ACE; Alternative Conditional Expectation) techniques, model-based control strategy, and stability analysis techniques such as Liapunov theory. In this study, the DNNC model is used because it is much easier to update and adapt the network on-line. In addition, this technique in conjunction with Levenberge-Marquardt algorithm can be used as a more robust technique for network training and optimization purposes. The ACE technique is used for scaling the networks input-output data and can be used to find the input structure of the network. The result from Liapunov theory is used to find the optimal neural network structure. In addition, a special neural network structure is used to insure the stability of the network for long-term prediction. In this model, the current information from the input layer is presented into a pseudo hidden layer. This model minimizes not only the conventional error in the output layer but also minimizes the filtered value of the output. This technique is a tradeoff between the accuracy of the actual and filtered prediction, which will result in the stability of the long-term prediction of the network model. Even though, it is clear that DNNC will perform better than PID control, it is useful to compare PID with DNNC to illustrate the extreme range of the non linearity of the processes were used in this study. The integration of the DNNC and the shortest-prediction-horizon nonlinear model-predictive control is a great candidate for control of highly nonlinear processes including biochemical reactors. References: 1. M. Nikravesh, A. E. Farell, T. G. Stanford, Control of Nonisothermal CSTR with time varying parameters via dynamic neural nework control (DNNC), Chemical Engineering Journal, vol. 76, 2000, pp. 1-16. 2. M. Nikravesh, Artificial neural networks for nonlinear control of industrial processes, " Nonlinear Model Based Process Control", Book edited by Ridvan Berber and Costas Karavaris, NATO Advanced Science Institute Series, Vol 353, 1998 Kluwer Academic Publishers, pp. 831-870 3. S. Valluri, M. Soroush, and M. Nikravesh, Shortest-prediction-horizon nonlinear model-predictive control, Chemical Engineering science, Vol 53, No2, pp. 273-292, 1998.
Dynamic Neural Network Control (DNNC): A Non-Conventional Neural Network Model Masoud Nikravesh EECS Department, CS Division BISC Program University of California Berkeley, California
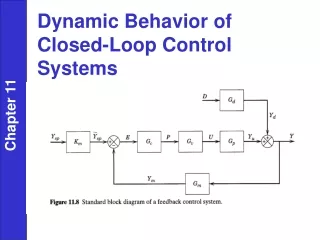
Dynamic Neural Network Control (DNNC) • Introduction • Theory • Applications and Results • Conclusions • Future Works
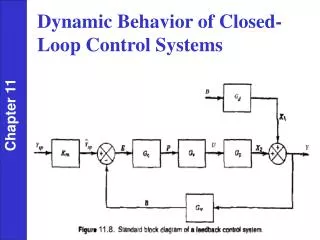
IMC d ysp + u w y e’ + P Q + - d + - P y
Modified IMC, Zheng et al. (1994) d ysp + u w1 y e’ w + + P Q1 + - - w2 d + - Q2 P y To address integral windup.
Non-linear model state-feedback control structure d ysp + u w’1 y e’ w + + P Q’1 + - - w’2 d P + Q’2 x - x=f(x)+g(x) u h(x(t-) y
Controller CA CA Trajectory Trajectory qc CA Model Setpoint Setpoint Filter Filter
Model Predictive Control Y ai Time i
k = discrete time y(k) = model output u(k) = change in the input (manipulated variable) defined as u(k)- u(k-1) d(k) = unmodelled disturbance effects on the output ai = unit step response coefficients N = number of time intervals needed to describe the process dynamics (Note: ) ym(k) = current feedback measurement y* (k+j) = predicted output at k+j due to input moves up to k. In the absence of any additional information, it is assumed that
Comparing DMC with the neural network, the following analogy may be drawn,
Extension of the DNNC Model to the MIMO Case in IMC Framework
Upper Mean Actual MPV Lower
Alternative Conditional Expectation Y X (Y) (X)
NN Prediction No. Epochs: 5 No. Hidden Nodes: 1 No. Epochs: 200 No. Hidden Nodes: 10
Controller CA CA Trajectory Trajectory qc CA Model Setpoint Setpoint Filter Filter
Process Model c (t)= exp ( - t ). h(t) : Fouling coefficient c(t) : Deactivation coefficient CA : effluent concentration, the controlled variable qc : coolant flow rate, the manipulated variable q : feed flow rate, disturbance CAf : feed concentration Tf : feed temperatures Tcf : coolant inlet temperature