Download
1 / 10
100 likes | 132 Views
Join us as we embark on the challenge of creating a robotic "mouse" capable of running through intricate mazes independently. Our project involves top-down design, sensors, motors, batteries, and a meticulous schedule to ensure success. We face challenges like programming, materials, and teamwork dynamics. Follow our journey as we strive to meet design objectives and deliver on time and within budget.

E N D
Curry Mouse EE 296 Project Proposal Presentation February 11, 2006
Group Members & Roles • Judy Lee • Hardware, Programming, & Webpage • Amy Maruyama • Hardware and Programming • Mindy Wong • Hardware and Programming
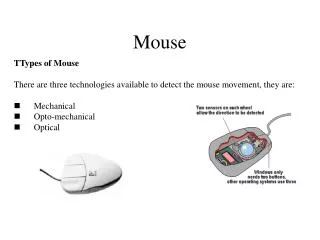
Overview of Micromouse The goal of Micromouse is to build a robotic “mouse” that can run through a 16 x 16 grid mazes unaided and find the center. To do this the mouse must be able to map out the maze by tracking where it has been and knowing where the walls are. The mouse also must recognize when it has reached the center.
TheApproach • Top-down approach • Top looking sensors • Stepper motors • Wall hugger • Tricycle wheel configuration • NiCd batteries • Stick to project design
Schedule Conflicts Sol: Making specific times we are supposed to meet every week Lack of knowledge & experience Sol: Start early, research on what other teams have done, and research on individual working components of the mouse Keeping on task Sol: Keep on task with our schedule Taking equal shares of work Sol: Assign each member an equal task and communicate with each other Potential Problems!!! GETTING OUR MOUSE TO WORK !!!
Programming Sol: Lots of time for debugging Getting materials Sol: Research types and decide early. Financial cost Sol: Research thoroughly to find best solution before buying parts. Split bill amongst the team.
Circuitry, relate to class work Design Engineering skills Consider all aspects and put together into one. Integrate circuits and programming Teamwork Work on time Keep things simple and efficient Work under budget Learning Expectations
Deliverable Goals • Design and build the mouse • Make the mouse go forward • Make the mouse track forward • Make the mouse turn left and right • Make the mouse track turns • Find the center of the maze • Finish on time • Don’t waste money. • Don’t KILL rabbits.
Schedule • Come up with a design (02/12-18) • Research (02/12-16) • List of materials (02/17-18) • Make Chassis (02/19-25) • Check design (02/19-20) • Get material (02/19-20) • Build (02/21-25) • Design a drive motor (02/26-03/10) • Analyze design (02/26-28) • Get additional materials (03/1) • Build & Test (03/2-10)
Develop a steering and turning method (03/11-22) • Analyze design (03/11-15) • Build and test with C (03/16-22) • Sensors to sense walls (03/23-31) • Get additional materials (03/23) • Determine location of sensors on PCB (03/23-24) • Build and test with C (03/25-31) • Control Logic (04/1-15) • Wall hugger algorithm (04/1-9) • A more complex algorithm (04/10-15) • Finishing touches and completion (04/15-20)