Download
1 / 12
120 likes | 141 Views
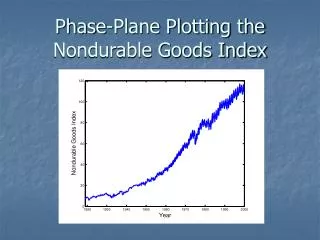
Learn to plot phase portraits in Matlab to analyze system equilibrium points and stability, using the undamped simple pendulum as an example. Explore linearization techniques for nonlinear systems.

E N D
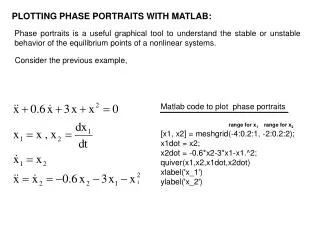
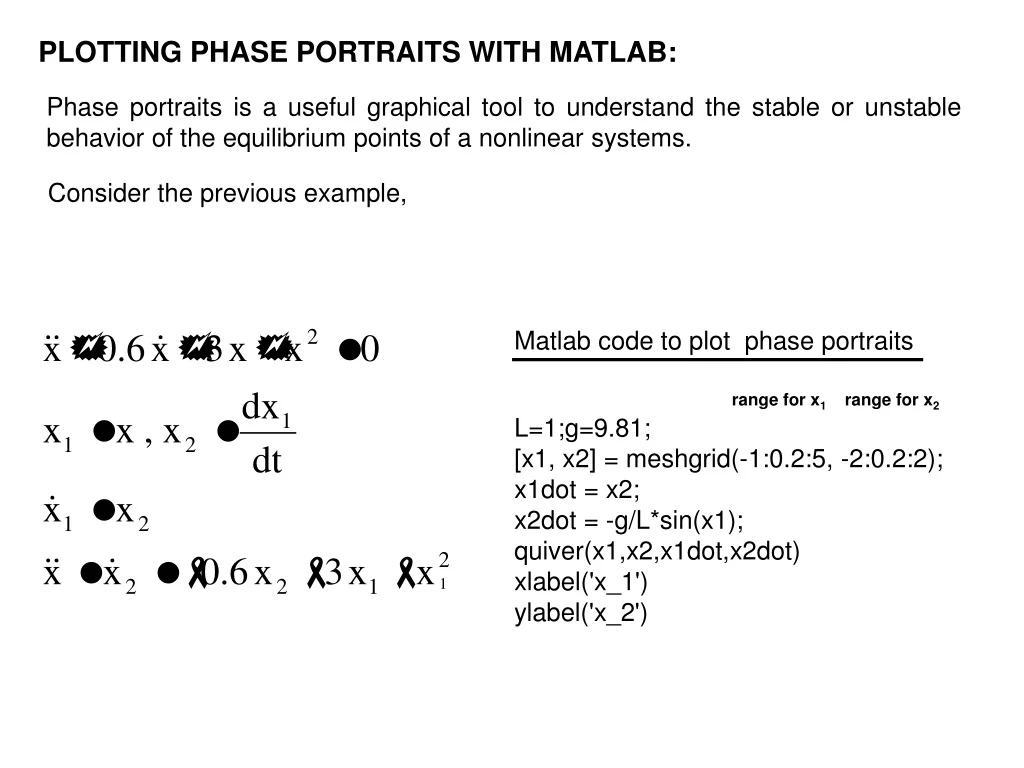
Matlab code to plot phase portraits L=1;g=9.81; [x1, x2] = meshgrid(-1:0.2:5, -2:0.2:2); x1dot = x2; x2dot = -g/L*sin(x1); quiver(x1,x2,x1dot,x2dot) xlabel('x_1') ylabel('x_2') range for x1 range for x2 PLOTTING PHASE PORTRAITS WITH MATLAB: Phase portraits is a useful graphical tool to understand the stable or unstable behavior of the equilibrium points of a nonlinear systems. Consider the previous example,
(-3,0) (0,0)
l g Matlab code to plot phase portraits θ Equilibrium points: (0, 0) and (p, 0) L=1;g=9.81; [x1, x2] = meshgrid(-1:0.2:5, -2:0.2:2); x1dot = x2; x2dot = -g/L*sin(x1); quiver(x1,x2,x1dot,x2dot) range for x1 range for x2 m Unstable Stable Example:Consider the undamped simple pendulum
(0,0) (p,0)
l e1 m For l=1 m At the equilibrium, all derivatives are zero Consider the small perturbations around the equilibrium point θd=0 Nonlinear terms can be linearized using the Maclaurin series.
m e1 l For θd=0 Higher order term clc;clear; A=[0 1;-9.81 0]; eig(A) ans = 0 + 3.1321i 0 - 3.1321i A Marginally stable For θd=p clc;clear; A=[0 1;9.81 0]; eig(A) ans = 3.1321 -3.1321 Unstable
Initial conditions Initial conditions [0.1;0] [0.1;0]
Example: Mathematical model of a nonlinear system is given by the equation Where f(t) is the input and x(t) is the output of the system. Find the equilibrium points for f=80 and linearize the system for small deviations from the equilibrium points. Find the response of the system The state variables are chosen as x1=x and x2=dx/dt=dx1/dt >>solve(‘64000*x1^2/(x1+2)=1.2’) x1d=0.00613, x2d=0 For the equilibrium condition x1=x1d+e1=0.00613+e1 x2=x2d+e2=e2
x1=x1d+e1=0.00613+e1 x2=x2d+e2=e2 f=fd+u
=0 =0 clc;clear; A=[0 1;-390.52 -9]; eig(A) ans = -4.5000 +19.2424i -4.5000 -19.2424i Stable system
Matlab code for step input with magnitude 2 clc;clear a=[0 1;-390.52 -9];b=[0 0.015]';c=[1 0];d=0; sys=ss(a,b,c,d); t=[0:.025:2]; [y,t,x]=step(sys*2,t); plot(t,y,'--','Linewidth',2);axis([0 2 0 0.00015]);grid; xlabel('time (sec)');ylabel('Y output');title('Step Response') c=[0 1]
u(t) 2 t e2 e2 e1 e1 u(t) 2 t We can obtain the same result using Simulink.