Download
1 / 3
30 likes | 120 Views
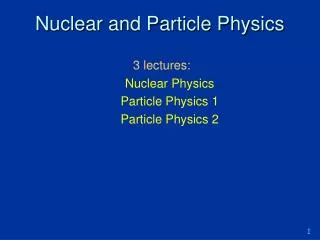
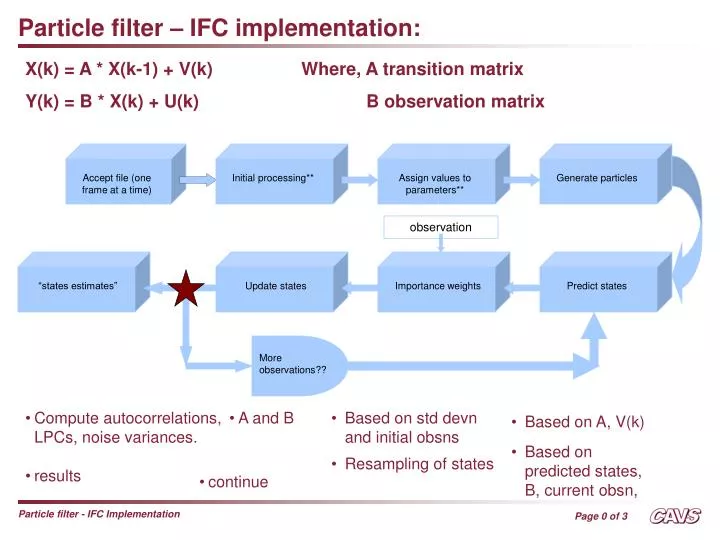
X(k) = A * X(k-1) + V(k) Y(k) = B * X(k) + U(k). Where, A transition matrix B observation matrix. Accept file (one frame at a time). Initial processing**. Assign values to parameters**. Generate particles. observation. “states estimates”. Predict states. Update states.

E N D
X(k) = A * X(k-1) + V(k) Y(k) = B * X(k) + U(k) Where, A transition matrix B observation matrix Accept file (one frame at a time) Initial processing** Assign values to parameters** Generate particles observation “states estimates” Predict states Update states Importance weights Predict states More observations?? • Compute autocorrelations, LPCs, noise variances. • A and B • Based on std devn and initial obsns • Based on A, V(k) • Based on predicted states, B, current obsn, • Resampling of states • results • continue • Particle filter – IFC implementation:
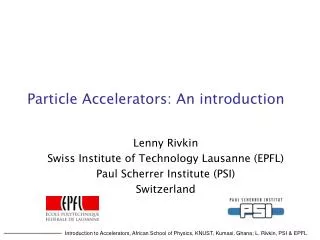
Results from Kalman and Particle filtering IFC Original signal Kalman-filtered particle-filtered
Particle Filtering for filtering: • Kalman filtering implementation gives some reasonable results: • Order affects the results. • Tracking (/ filtering) of the speech is possible. • Particle filtering as used for filtering (similar to Kalman filter implementation) : • Computation results at each block are correct (mathematically). • Has different results (strange results) as compared to the one had with Kalman filter. • Reasons: (probable) • Lesser number of particles • Lesser order value • Noisy signal cannot be modeled by a single Gaussian distribution. • Modeling of speech signal in the way done is flawed. • Code has some serious problems [Huh?] Ruled out. (different number of particles tried) 50, 100, 700 Ruled out. (different orders tried) 5, 8, 10 Ruled out. But code has not yet been reviewed.