Download
1 / 71
710 likes | 1.02k Views
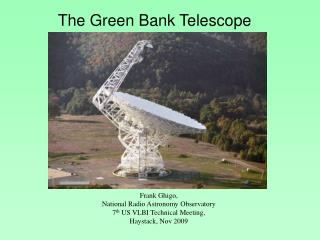
The Green Bank Telescope. Antenna Control (collimation and pointing). Richard Prestage. Scientist / PTCS System Architect. Telescope Structure and Optics. Telescope Structure and Optics. Telescope Structure and Optics. Telescope Structure and Optics. Telescope Structure and Optics.

E N D
The Green Bank Telescope Antenna Control (collimation and pointing) • Richard Prestage • Scientist / PTCS System Architect
Challenges for large telescopes The Astronomical Journal, February 1967
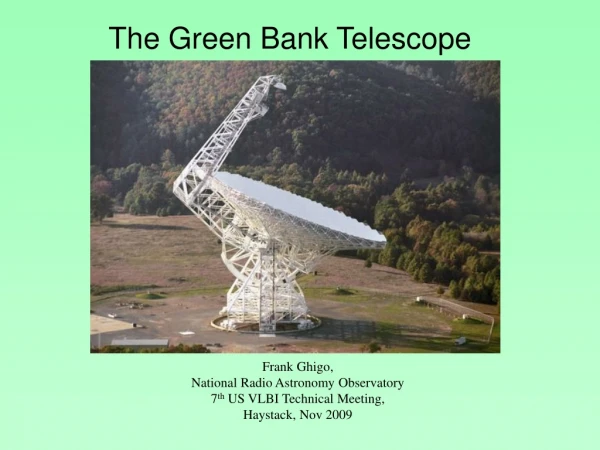
Telescope Construction The Astronomical Journal, February 1967
Quasi-Homologous design NRAO/AUI/NSF
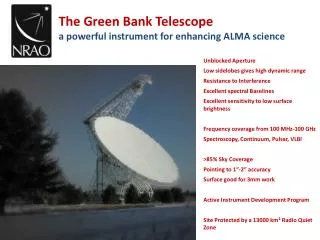
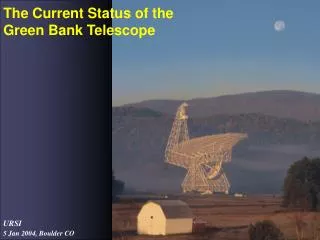
Large Collecting Area Unblocked Aperture Sensitive to Low Surface Brightness Angular Resolution Sky Coverage & Tracking (>85%) Frequency Coverage Radio Quiet Zone state-of-art receivers & detectors modern control software flexible scheduling Characteristics of the GBT The Advantage of Unblocked Optics Dynamic Range Near sidelobes reduced by a factor >10 from conventional antennas Gain & Sensitivity The 100 meter diameter GBT performs better than a 120 meter conventional antenna Reduced Interference
Antenna Control / PTCS • The GBT was designed that so that the telescope would perform as an “ideal” telescope for frequencies up to 15 GHz. To observe at frequencies above 15 GHz, we need to measure and correct for departures of the telescope from ideal behavior. • Pointing • Collimation • Surface Accuracy
Antenna Control / PTCS The optical and structural design was carefully selected in order to achieve certain scientific (observational) objectives, but this design acknowledged the influence of a variety of repeatable and non-repeatable factors that would degrade performance over the desired operating regime. The GBT Precision Telescope Control Systemis the combination of metrology systems, servos and control software which will deliver the pointing, collimation and surface accuracy required to operate the GBT at frequencies up to 115 GHz (wavelengths as short as 2.6 mm).
Departures from Ideal (I) • [Refraction] • Misalignment of the antenna structure (e.g. non-perpendicularity of the Az and El axes) • May change (slowly) with time – e.g. effects due to non-flatness of azimuth track. • Deformations due to gravity (affects all three components). Most well behaved deformation; depends only on GBT elevation angle. The structure was designed so as to minimize the effect where possible, and the distortions have been modeled to some level of accuracy.
Departures from Ideal (II) • The effect of temperature change over time and location in the structure is to distort the optical alignment. Although the structure was designed to minimize these effects, they can still be substantial. While temperature effects are repeatable, the state of the structure (distribution of temperatures, whether the structure is in thermodynamic equilibrium) is not well known. • Wind loading can cause structural loads that significantly distort the telescope (i.e. cause the optical properties to change). Again, the effects are repeatable, but the flow field will not be well known. • Structural vibrations can be excited by wind or servo system drives. These vibrations can be significant, and have modal frequencies from 0.6Hz and up. The largest magnitude motions are in the feedarm assembly.
PTCS System Philosophy: Original Intent • Use sophisticated metrology system (specifically the laser rangefinders) to measure the absolute position, orientation and shape of the GBT optical elements in an appropriate coordinate system. • “Division of Concerns” – i.e. collimation and pointing are independent • Adopt a specific control strategy (e.g. move the subreflector to the position appropriate for the best-fit parabola at the required elevation) • Potentially, use subsequent optical elements (e.g. subreflector) to correct for misalignments of preceding elements (i.e. primary).
THIS APPROACH FAILED • Metrology system was too complex and did not deliver required performance. • Control algorithms not developed in parallel with metrology system • System integration challenges were severely under-estimated • Effort required to complete the system would be prohibitive • This approach put on hold at end of CY 2003; never subsequently revisited
Alternative Approach • Sophisticated application of traditional astronomical approaches • Astronomical measurements define reference positions of optical elements • One result is that “division of concerns” is not achieved, i.e. pointing model depends on collimation model. • Less “clean”, but significantly simpler to implement, and has allowed GBT to achieve 90GHZ operation!
Components of the PTCS (I) • Pointing: • Antenna Control System, including “thermally neutral” pointing model • Temperature Sensor System and “dynamic temperature corrections” • “Inclinometry system” to measure and correct for azimuth track irregularities • “Quadrant Detector” to correct for (non-gravitational) motions of the antenna feed arm (collimation error treated as a pointing error). • Collimation: • “Focus-tracking” – adjusting the position of the prime focus / subreflector to be at the position appropriate for the observed primary mirror parabola as a function of elevation.
Components of the PTCS (II) • Surface Accuracy: • Photogrammetry to obtain initial actuator zero-points • FE model for initial gravitational deformation correction • “Out-of-focus holography” to correct for residual gravity and thermal deformations • “With-phase holography” to correct for small-scale surface errors
Remainder of this talk High-level Antenna Control Collimation (“upstream” of pointing) Pointing
High-level Antenna Control Collimation (“upstream” of pointing) Pointing
Main Drives • Azimuth: 1 drive/wheel, 4 wheels per truck, 4 trucks • Elevation: 8 drives (bull gear/pinion) • 0.3” per bit, azimuth and elevation encoders • Analog velocity (tach) and torque (current) loops • Digital position loop 50Hz sampling (10 Hz parabolic demand) • ~0.3 Hz closed loop bandwidth (< ~0.6 Hz first structural mode !) • Current loop lag-compensated, velocity loop lead-lag compensated, position loop type-II with nonlinear compensation for large angle motions • < 1” spec tracking error for constant velocity • Max 20 Deg/min elevation, 40 Deg/min azimuth
Astronomical Coordinate Conversions Any of these coordinate systems may be used to control telescope. Use SLALIB to perform coordinate conversions
Astronomical Catalogs • Possible input formats: • SPHERICAL - A fixed position in one of our standard coordinate systems, e.g., RA/DEC, AZ/EL, GLON/GLAT, etc. • EPHEMERIS - A table of positions for moving sources (comets, asteroids, satellites, etc.) • NNTLE - NASA/NORAD two-line element sets for earth satellites. • CONIC - Orbital elements for solar system objects. • Can enter solar system objects (sun, moon, major planets) by name.
Offsetting with respect to tracking center • Powerful facilities for offsetting with respect to tracking center • Can perform simple offsets, e.g. track in J2000 and perform a raster scan in (Az,El) • Can perform circles, ellipses, daisy-petal scans, lissajous figures • Can define arbitrary scan pattern as series of piecewise (position, velocity, acceleration, time) scan segments
High-level Antenna Control Collimation (“upstream” of pointing) Pointing
Collimation • As telescope tips in elevation: • Feed-arm tilts downwards • Surface deforms, displaces and rotates to a new parabola • Telescope becomes mis-collimated • Error in pointing • Loss of gain
Collimation • Srikanth, King and Norrod (1994): • A geometrical optics analysis of the system for a given position of the subreflector was used to obtain the phase distribution across the aperture. • By representing the phase distribution as a plane wave tilted relative to the aperture plane of the telescope, the residual phase distortion in the wavefront can be found. • This analysis was carried out at different locations of the subreflector until the residual phase distortion was a minimum.
Collimation • A diffraction analysis was carried out for the system at this position of the subreflector. • For the telescope at zenith the loss in efficiency is completely recovered. At horizon the loss in efficiency is 2.4% at 50GHz. • This is the result of the residual phase distortion as the feed is still laterally displaced from the secondary focus. • The tilt in the phase distribution is compensated for by re-pointing the antenna. • A similar analysis for shaped Cassegrain antennas was performed by Battilana and Hills (1993).
Focus Tracking • The optimum position of the subreflector in X and Y measured empirically using astronomical observations at 2 GHz. • Track a bright calibrator • Step the telescope through a range of X (Y) positions. • Perform a peak scan at each position to determine peak amplitude for that focus setting • Fit 5th order polynomial to peak amplitude as a function of focus setting for an individual elevation. • Fit to A + B*cos(el) + C*sin(el)
Axial Focus Measurement Axial Focus Ghigo et al. (2001)
High-level Antenna Control Collimation (“upstream” of pointing) Pointing
Point Source Calibrators PCALS 4.0: 7108 sources Two-dimensional rms error < 0.2 arcsec 3 mm pointing calibrators Condon & Yin (2005)
Data Collection All-sky Observations Single Source Track Up-Down at Night Gravity NCP Source Temperature Gaussian Fits (Az, El, Focus) Polarization (LCP – RCP) Direction (Forward – Backward) Jack Scan
Simple Pointing Model Balser et al. (2002) Azimuth Series ∆A Cos(E) Elevation Series ∆E
Structural/Air Temperature Sensors • YSI 083 thermistors • YSI 4800LC ThermistorLinearizing Circuit • 0.15 C accuracy, -35 to 40 C • 0.05 C interchangableaccuracy • 0.01 C resolution, 1 sec sampling • 19 structure sensors (soon 23) • 5 air sensors (forced convection cells, ~ 5 sec time constant) • Structure thermal distortions • Vertical air lapse
Temperature Sensors R.Side EL Bearing BUS 15+440
Algorithms • Use existing GBT gravity pointing and focus models • Structure is linear: Thermal effects superpose • Temperature effect on focus, pointing assumed linear in temperatures • No dependence on air or bulk temps, just differences • Simultaneously estimate gravity and temperature model coefficients • Estimate coefficients using 9/11, 10/2, 11/10 data • Test models using 9/5, 11/20 data