Download
1 / 7
70 likes | 78 Views
Learn about motion diagrams, the particle model, coordinate systems, vectors and scalars, and how to add vectors using the tip-to-tail method. Understand the concepts of position, magnitude, direction, and the resultant vector.

E N D
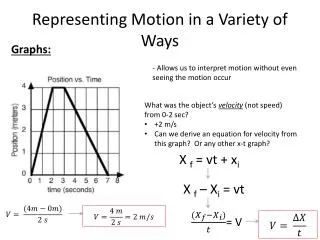
Motion Diagrams Motion Diagrams: A series of images showing the position of a moving object at equal time intervals.
The Particle Model A simplified version of a motion diagram where the movement of the object is replaced by a series of dots.
Coordinate Systems Coordinate System: A system of making measurements. Origin: Where the y-axis and x-axis equals zero. Position: How far an object is from the defined origin. Can be neg.
Vectors and Scalars Vectors: Quantities that have both a magnitude and direction. They are represented with an arrow whose magnitude is represented by the length and direction is represented by the direction the arrow is pointing. ex: velocity and force Scalar: Quantities that have only a magnitude. ex: speed, mass, time
Adding Vectors Adding scalar quantities is relatively simple: 6 sec. + 8 sec. = Adding vectors is a little more challenging: You walk 6 mi. North, then turn and walk 8 miles East. How far are you from home? The Tip to Tail Method Always put the tip of one vector to the tail of the other. The Resultant: The one vector that represents the sum of the vectors. This vector can effectively replace the other two vectors. 8 mi. 6 mi. 10 mi.