Download
1 / 5
50 likes | 134 Views
8.3 detection performance and monte-carlo simulation. In example 8.2:. N=8; pf=0:0.01:1; d=0; pd1=Q(Qinv(pf)-sqrt(N).*d); % function y=Qinv(x) % y=sqrt(2).*erfinv(1-2.*x); d=0.2; pd2=Q(Qinv(pf)-sqrt(N).*d); d=0.5; pd3=Q(Qinv(pf)-sqrt(N).*d); d=1; pd4=Q(Qinv(pf)-sqrt(N).*d);

E N D
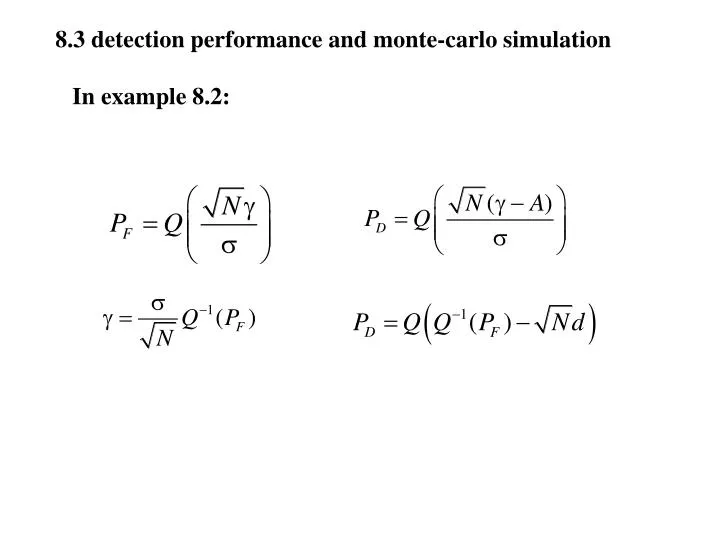
8.3 detection performance and monte-carlo simulation In example 8.2:
N=8; pf=0:0.01:1; d=0; pd1=Q(Qinv(pf)-sqrt(N).*d); % function y=Qinv(x) % y=sqrt(2).*erfinv(1-2.*x); d=0.2; pd2=Q(Qinv(pf)-sqrt(N).*d); d=0.5; pd3=Q(Qinv(pf)-sqrt(N).*d); d=1; pd4=Q(Qinv(pf)-sqrt(N).*d); plot(pf,pd1,'k',pf,pd2,'k',pf,pd3,'k',pf,pd4,'k','linewidth',1) grid xlabel('P_F') ylabel('P_D')
信噪比d 检测性能曲线