Download
1 / 6
• 60 likes • 212 Views
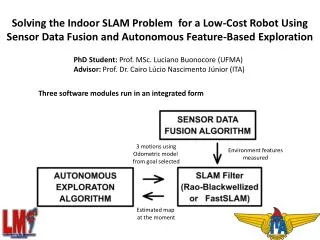
Solving the Indoor SLAM Problem for a Low-Cost Robot Using Sensor Data Fusion and Autonomous Feature-Based Exploration. PhD Student: Prof. MSc. Luciano Buonocore (UFMA) Advisor : Prof. Dr. Cairo Lúcio Nascimento Júnior (ITA). Three software modules run in an integrated form.

E N D
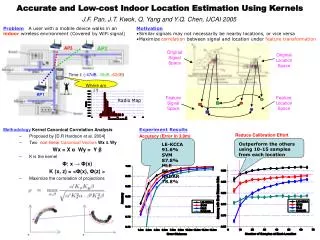
Solving the Indoor SLAM Problem for a Low-Cost Robot Using Sensor Data Fusion and Autonomous Feature-Based Exploration PhD Student: Prof. MSc. Luciano Buonocore (UFMA) Advisor: Prof. Dr. Cairo Lúcio Nascimento Júnior (ITA) Three software modules run in an integrated form 3 motions using Odometric model from goal selected Environment features measured Estimated map at the moment
- 3 typesofsensors: • Visual (wireless CAM + Laser) • Infrared (twounits) • Sonar • - Softwares: • PC: overall system intelligence • (SLAM filter, Data fusion and • Autonomous Exploration). • b) Robot: Mutli-Threading C code • that executes basic commands, • distance measures and some • status. • - Communication PC-robot: • IP Wireless.
proposed sensor data fusion algorithm Experiment to evaluate the mapping accuracy of the algorithm
proposed autonomous feature-based exploration • Basic tasks: • Goals select →locally (1) or environment opening (2) • Finish condition (of the exploration task)
Slam experiment in a small indoor environment WITHOUT AUTONOMOUS EXPLORATION WITH AUTONOMOUS EXPLORATION • RESULTS: • The estimated and real robot poses differences in both experiments are less than 2%. • The map generated by the filter are similar and consistent for navigation purpose. • NEXT EXPERIMENT: • The solution to SLAM problem is already in progress (hallway of 80 m with some loops situations) to validate the algorithms proposed.
Example of data processing in fusion algorithm for an specific robot pose