Download
1 / 14
140 likes | 156 Views
This study delves into the challenging task of maintaining arc-consistency over mutex relations in planning graphs during the search process. The research by Pavel Surynek and Roman Barták showcases significant contributions to AI planning, focusing on optimal solutions and justifications. Through experiments and evaluations, the authors address conflicting and mutually exclusive actions in planning scenarios, highlighting the importance of arc-consistency in resolving complex planning graph issues efficiently.

E N D
Maintaining Arc-consistency over Mutex Relations in Planning Graphsduring Search Pavel SurynekRoman BartákCharles University, PragueCzech Republic
Experiments Arc-consistency AI Planning Planning Graphs Maintaining Arc-consistency over Mutex Relations in Planning Graphsduring Search What it is about Problem Optimal Solution Our Contribution Justification AI Planning AI Planning Planning Graphs Arc-consistency Experiments Planning Graphs Arc-consistency Experiments Pavel Surynek and Roman Barták FLAIRS 2007
location F 2 1 4 3 6 5 location A location B location D location C location E 2 location F 4 6 location A location B location D location C 1 3 5 location E AI Planning Problems - example / motivation Dock Worker Robots (Ghallab, Nau, Traverso, 2003) Initial state of the planning world Actions transforming states of the planning world Task: Transform using actions take(box1,craneA)load(box1,small_truck) Goal state of the planning world Pavel Surynek and Roman Barták FLAIRS 2007
... ... ... AI Planning Problems - optimal solution / existence Initial state = set of atoms(empty(small_truck), on(box1, box3),...) A1 A2 An ... Perform actionsA1=move(small_truck,locationA)A2=take(craneB,box2),... Optimal solution =shortest possible sequence Action = a triple(i) precondition = set of atoms, that must be contained in a state(ii) positive effect = set of atoms added to the state(iii) negative effect = set of atoms deleted from the state Ax Ay Az ... parallel actions (must not conflict) Reach the goal = set of literals (required atoms and forbidden atoms) Pavel Surynek and Roman Barták FLAIRS 2007
1 2 3 1 ... ... ... Conflicting Actions - mutual exclusion (two) actionsload(small_truck,box1)load(big_truck,box1)are dependent (two) actionsload(small_truck,box1)load(big_truck,box2)are independent Independent actions can be performed in parallel Dependent cannot occur together at a single time step ►►► actions are mutually excluded = mutex A set of actions at a single time step is mutex free Pavel Surynek and Roman Barták FLAIRS 2007
x x x x x x x x x x x Goal(mutex free) x = x x x = x Initial state A layer represents set of states Planning Graphs(Blum, Furst, 1997) new atom new action Pavel Surynek and Roman Barták FLAIRS 2007
x x x x x x x x x x x GraphPlan / Plan Extraction (Blum, Furst, 1997) x x x x each action supports its positive effect (set of atoms) x for each atom, we have several supporting actions►►► choice points mutex free set of actions supporting the goal induces another goal at lower layer Pavel Surynek and Roman Barták FLAIRS 2007
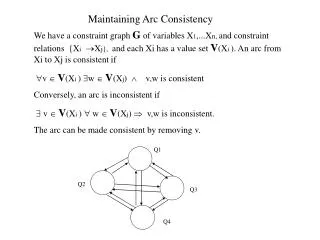
atom 1 atom 2 atom 3 atom 4 Goal/Sub-goal: x A1 A1 A4 A4 A8 A8 x x A2 A2 A5 A5 A9 A9 x x x A3 A3 A6 A6 A10 A10 A11 A11 x x A7 A7 A12 A12 supports foratom 4 supports foratom 2 supports foratom 3 supports foratom 1 Our Contribution - Arc-consistency Determining a set of mutex free actions - very frequent and time consuming operation ►►►address the sub-problem cleverly View the layer as a Constraint Satisfaction Problem (CSP) and maintain arc-consistency(MAC)during search for mutex free actions Select action A1 Propagate changes byAC Solved using one (backtrack) decision (the rest is AC propagation) Pavel Surynek and Roman Barták FLAIRS 2007
Why Arc-consistency - several notes AC represents a good compromise between time consumption and strength of propagation Stronger consistency - Singleton AC provides slightly better propagation, but very time consuming Weaker consistency - Forward checking is fast, but propagates only in neighborhood of the change Planning graphs are large - hundreds of atoms per layer, hundreds of supporting actions per atom►►► large search space Pavel Surynek and Roman Barták FLAIRS 2007
Experimental evaluation -Towers of Hanoi Original puzzle (3 pegs, 4 discs, and 1 hand) Our generalization (more pegs, discs, and hands) Pavel Surynek and Roman Barták FLAIRS 2007
2 1 3 4 5 6 7 8 9 Experimental evaluation -Dock Worker Robots Locations with several places for stacks for boxes and with several cranes Each crane can reach some stacks within location (not all) Trucks of various capacities (small - 1 box, big - 2 boxes) Pavel Surynek and Roman Barták FLAIRS 2007
distance X distance Y distance Z Experimental evaluation - Refueling planes Several planesdislocated at several airports Transporta fleet of planes atdestination airport Airport - unlimited source of fuel, planes can refuel in-flight Pavel Surynek and Roman Barták FLAIRS 2007
Experimental evaluation - Results Significant improvements on problems withhigh action parallelism (Dock Worker Robots, Refueling Planes, Hanoi Towers with more hands) Almost no improvement on problems withno action parallelism (Dock Worker Robots with one truck, Refueling lanes with one plane, Hanoi Towers with one hands) Pavel Surynek and Roman Barták FLAIRS 2007
Conclusions • Improvement of the GraphPlan algorithm Better method for finding mutex free set of actions supporting a goal We use maintaining arc-consistency (AC) • Experimental evaluation Several real-life planning problems (DWR, Planes, Hanoi) Maintaining AC especially successful on problems with high action parallelism Pavel Surynek and Roman Barták FLAIRS 2007