Download
1 / 38
400 likes | 629 Views
Intensive Program on Computer Vision IPCV 200 2 July 22 – August 2 , 200 2 Koblenz, Germany http://www.uni-koblenz.de/~lb/lb_activities/ipcv02/ipcv02.html. Feature Extraction for Classification : Hough Transform and Gabor Filtering Heikki Kälviäinen. Professor Computer Science

E N D
Intensive Program on Computer VisionIPCV 2002 July 22 – August 2, 2002Koblenz, Germanyhttp://www.uni-koblenz.de/~lb/lb_activities/ipcv02/ipcv02.html H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Feature Extraction for Classification: Hough Transform and Gabor FilteringHeikki Kälviäinen Professor Computer Science Laboratory of Information Processing Heikki.Kalviainen@lut.fi http/www.it.lut.fi/~kalviai H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Lappeenranta University of Technology, Finland H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Contents • Fundamentals of computer vision • Digital image processing • Pattern recognition & Machine vision • Fundamental steps in image processing • Applications • Feature Extraction for Classification • Hough Transform • Gabor Filtering H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Digital Image Processing • R. C. Gonzalez & R.E. Woods, Digital Image Processing, Addison-Wesley, 1993 : “A digital image is an image f(x,y) that has been discretized both in spatial coordinates and brightness” • f(x,y) is a 2D intensity function where x and y are spatial coordinates and the value of f at any point (x,y) is proportional to the brightness of the image at the point H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Digital Image Processing • A digital image consists of pixels (also called image elements, picture elements) • For example: an image of a 256 x 256 array with 256 gray-levels (8 bits: 0 black, 255 white) • Binary images: only two values • Gray-level images: e.g. 256 values • Color images: three color components (e.g. RGB) • Spectral images: several components H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Pattern Recognition and Machine Vision • A digital image is just a set of pixels ? • Pattern recognition = measurements and observations from natural scenes and their automatic analysis and recognition • Computer vision = image analysis using pattern recognition techniques • Machine vision = application oriented image analysis H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
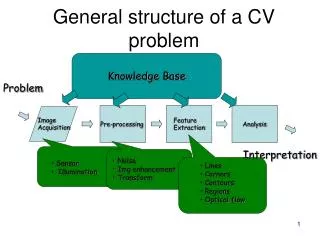
Fundamental Steps in Image Processing • Image acquisition • Preprocessing • Segmentation • Representation and description • Recognition and interpretation • Image processing system H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Robot Vision: Handling of Sheets in a Workshop H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Robotized Handling of Objects H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Automatic Cheese Factory (RTS, Ltd.) Video H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Requirements for Successful Applications • Fast • No delays • Accurate • Assist/replace human vision • Not too expensive • Return on investment • Easy to implement and to use • End users are experts in their own field only! H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Applications (some areas) • Recognition, classification, and tracking of objects • Face recognition, fingerprint detection • Speech recognition, motion detection • OCR, document processing, image databases • Industrial applications • Visual quality control • Process automation • Robotics H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Applications (some areas) • Telecommunications • Image compression, video technology. • Military applications • Tracking of objects, surveillance systems. • Remote Sensing • Analysis of satellite images, classification of airplanes,spying, weather forecasts, forest fire detection, missile control. H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Applications (some areas) • Medical image processing • X-ray images, ultrasound images, images of cells, chromosomes, proteins. • Detection of tumors, cancer; assistance in operations. • Chemistry, Biology, Physics, Astronomy • DNA, molecules, particles, planets. H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Applications in Finland • TEKES technology programs • Machine Vision (1992-1996) & Intelligent and Adaptive Systems Applications (1995-2000) & Intelligent Automation Systems (2001-2004) • Applications of • process control • robot vision • quality control in electronics, metal, forest, food manufacturing, etc., industry & applications in business H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Visual Quality Control in Steel Manufacturing H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Robot Positioning: Deflection Compensation H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Visual Inspection on Wooden Surfaces H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Visual Inspection on Wooden Surfaces H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Industrial Robot for Windscreen Grinding Quality Control in Printing Industry Punch Press Quality Assurance Classification of Parquet Pieces Controlled Wood Cutting Automatic Cheese Production Detection of Food Fatness Baking Better Biscuits Sorting Ceramic Tiles Multispectral Video Image databases (see, e.g. PICSOM, http://www.cis.hut.fi/research/demos.shtml) Other Applications H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
References • R. C. Gonzalez & R.E. Woods, Digital Image Processing, Addison-Wesley, 1993. • See more references for example at http://www.it.lut.fi/opetus/99-00/010588000/refs.html • Applications: • Finland: Machine Vision 1992-1996. TEKES Technology Programme Report 15/96. Final Report, 1996. • LUT: http://www.it.lut.fi/research/ip/appl.html • Systems: for example, RTS Group (www.rts-group.com) H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Hough Transform • A method for global feature extraction: • y = a x + b => b = -x a + y. • For each pixel (x,y) compute a curve b = -x a + b into the parameter space. • Alternatively the normal presentation of a line: • Hough Transform detects sets of pixels which represent geometric primitives in a binary image. • Lines, circles, ellipses, arbitrary shapes, etc. • Tolerant to noise and distortions in an image, but traditional versions suffer from problems with time and space complexities. • New variants: probabilistic and deterministic Hough Transforms. H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
The Kernel of the Hough Transform • Create the set D of all edge points in a binary picture. • Transform each point in the set D into a parameterized curve in the parameter space. • Increment the cells in the parameter space determined by theparametric curve. • Detect local maxima in the accumulator array. Each local maximum may correspond to a parametric curve in the image space. • Extract the curve segments using the knowledge of the maximum positions. H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Randomized Hough Transform (RHT) • Developed in Lappeenranta University • of Technology (LUT), • FINLAND. • Xu, L., Oja, E., Kultanen, P, ”A New Curve Detection Method: Randomized Hough Transform (RHT), Pattern Recognition Letters, vol. 11, no. 5., 1990, pp. 331-338. H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
The Kernel of the Randomized Hough Transform (RHT) • Create the set D of all edge points in a binary edge picture. • Select a point pair (d_i, d_j) randomly from the set D. • If the points do not satisfy the predefined distance limits, go to Step2; otherwise continue to Step4. • Solve the parameter space point (a, b) using the curve equation with the points (d_i, d_j). • Accumulate the cell A(a, b) in the accumulator space. • If the A(a, b) is equal to the threshold t, the parameters a and bdescribe the parameters of the detected curve; otherwise continue to Step 2. H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Advances of RHT over SHT • Infinite scope parameter space. • Arbitrarily high parameter resolution. • High computational speed. • Small storage. H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
RHT Extensions Kälviäinen, H., Hirvonen, P., Xu, L., Oja, E., ”Probabilistic and Non-probabilistic Hough Transforms: Overview and Comparisons,” Image and Vision Computing, Vol. 13, No. 4, 1995, pp. 239-251.
Feature extraction using Hough Transform H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Applications of Hough Transform • Randomized Hough Transform (RHT) • Curve detection • Motion detection • Mixed pixel classification • Image compression • Vanishing point detection • Image databases • etc.
Application of Hough Transform for image databases • Content-based matching of line-drawing images using Hough Transform • Similarity of images in image databases • Hough Transform as a feature extractor • Translation-, rotation-, and scale-invariant features from the accumulator matrix
Compression, Similarity, Matching, Object Recognition H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany
Image Processing Using Gabor Filtering • For local and global feature extraction. • Filtering in time (spatial) space and frequency space. • For image processing and analysis two important parameters: frequency f and orientation theta. • More information: • Gabor lecture notes 1: (IPCV2002_Gabor1.ps) Introduction to the theory of Gabor functions. • Gabor lecture notes 2: (IPCV2002_Gabor2.ps) Image analysis using Gabor filtering: practice and applications. H. Kälviäinen, IPCV 2002, July 22 - August 2, 2002, Koblenz, Germany