Download
1 / 24
260 likes | 568 Views
Work In Progress. Monte Carlo Simulation of Folding Processes for 2D Linkages Modeling Proteins with Off-Grid HP-Chains. Ileana Streinu Smith College. Leo Guibas Rachel Kolodny Michael Levitt Stanford University. Simple Models of Proteins. Model a Protein as 2D Chain of Beads

E N D
Work In Progress Monte Carlo Simulation of Folding Processes for 2D LinkagesModeling Proteins with Off-Grid HP-Chains Ileana Streinu Smith College Leo Guibas Rachel Kolodny Michael Levitt Stanford University
Simple Models of Proteins Model a Protein as 2D Chain of Beads • Each amino acid (=bead) in the chain is polar or hydrophobic • PHHPH (still need to specify distances)
Simple Exact Models • Explores what non-local interactions can create • Structure • Stability • Folding kinetics • Proposed by K. Dill (1985) From: “Principles of protein folding – A perspective from simple exact models” Dill et al. Protein Science (1995)
Simple Off-Grid Model • Still HP-chains • Same energy model • Still in 2D • Simple means simple motions • Based on pseudo-triangulation mechanisms • Focus on folding
Overview • Pseudo Triangulations and 1DOF mechanisms in 2D • Simple simulation of folding • Problems and future work
pseudo triangle pseudo 4-gon
Pointy Pseudo Triangulation (PT) • 2n-3 edges - Pointy • Planar • Maximal • Laman graph • Minimally rigid
1DOF mechanisms Removing a hull edge turns it into a 1DOF mechanism
advantages disadvantages
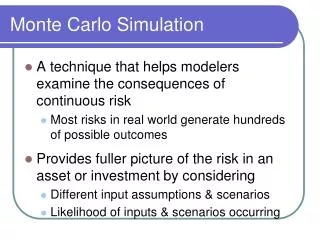
Monte-Carlo Simulation • A way to generate Boltzmann distribution on the states of the system • Need: • Transition probability between configurations satisfies detailed balance • Finite number of steps between any 2 configurations
System Validation • Measure (as a function of time) • Energy • Radius of gyration • Look for secondary structure formation • Can we “fold” large “proteins” ?
PT Linkage Package • Uses: • PT workbench by L.Kettner • CGAL • GLUT & GLUI • CLAPACK Runs on Linux
Calculates contractive and expansive motion H/P Nodes Linkage edges PT Linkage Package
Motion Model • Move mechanism until PT property is violated at an alignment event. • This guarantees chain self-avoidance throughout • Alignment can occur at any vertex • Not ones inside a rigid component • Find first one
i j k Motion Model • Write a quadratic system for each vertex • 2n-3 variables • 2n-3 equations • Fixed edge lengths • 2n-4 edges • Alignment edges ik and jk at vertex k
Motion Model • Take into account that nodes have radii • Expansive/Contractive • Use Newton-Raphson to solve set of equations • Doesn’t always work
Rigid Components PT Linkage Package
Rigid Components of a PT • Detecting rigid components in linear time • In PT: maximal convex components • with J. Snoeyink • O(n4) algorithm for general minimally rigid graphs minus one edge [SIH]
Detecting Rigid ComponentsMaximal convex components • - Keep turning left (as little as possible) • Mark your path& notice when you visit twice • Backtrack if needed Linear time
Random PT PT Linkage Package
Picking a Random PT • Given set of points • Unknown: total number of PTs • Conjecture: Random walk on 1-Skeleton of PT polytope is rapidly mixing • Flip polynomial number of times to find random PT Known: TRUE if set is convex
What Next ? • Understand why/when Newton-Raphson fails to find motion • Experiment with large proteins