Download
1 / 11
110 likes | 239 Views
Reconstruction of Polyhedron Objects by Structure Graph Integration. Krzysztof Skabek Institute of Theoretical and Applied Computer Sciences Polish Academy of Sciences, ul. Bałtycka 5, 44-100 Gliwice, e-mail: krzysiek@iitis.gliwice.pl. Contents. 1. Stages of 3D Scene Reconstruction

E N D
Reconstruction of Polyhedron Objects by Structure Graph Integration Krzysztof Skabek Institute of Theoretical and Applied Computer Sciences Polish Academy of Sciences, ul. Bałtycka 5, 44-100 Gliwice, e-mail: krzysiek@iitis.gliwice.pl KOSYR’2001
Contents 1. Stages of 3D Scene Reconstruction 2. Graph Representation of 3D Scene 3. Structure Graph Integration 4. The Example of Scene Reconstruction 5. Conclusions
The scope of the presented method Stages of 3D Scene Reconstruction
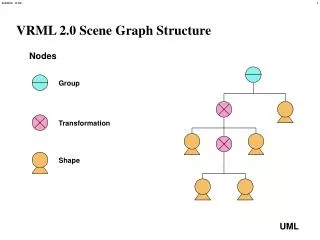
Graph Representation of 3D Scene Contour Graph: Face Graph: • set of vertices in the scene • set of connections among vertices • 3D coordinates (x,y,z) of vertices • set of faces in the scene • set of connections among faces • parameters of faces • parameters of face connections
Construction of Structure Graphs 4 7 4 Contour Graph 6 1 3 1 3 5 2 2 Face Graph
Integration of Structure Graphs I GKi – the contour graph obtained for ith view point GSi – the face graph for ith view created GKi GKMi – the integrated contour graph after i steps GSM – the integrated face graph after i steps WKi – set of corresponding vertices in GKi and GKMi-1 WSi – set of corresponding vertices in GSi and GSMi-1
Integration of Structure Graphs II • Building GKi and GSi for ith view point • Subgraph matching of GSi and GSMi-1; storing the matched vertices in WSi. • Finding correspondences between GKi and WSi. • Calculation of the translation vector Ti and the rotation matrix Ri transformating coordinate system of GKi into the coordinates of GKMi-1 • Calculation of new coordinates for vertices from GKi (using Ti and Ri) • Consolidation of contour graphs:GKMi-1 & GKi GKMi, GSMi-1 & GSi GSMi • Checking the completeness of reconstruction
Completeness of the Representation • The total rotation angle in all iterations exceeds 360º • Passing a given number of iterations without encountering new scene objects
The Example of Scene Reconstruction Input Graph IntegratedContour Graph
Conclusions • Graph matching makes possible to reconstruct unknown polyhedra even if viewpoints are not exactly located in the scene; • Heuristics significantly increase the average time of graph matching algorithms; • The estimation of a viewpoint position is useful to verify the obtained scene models