Download
1 / 19
210 likes | 407 Views
A Review on Controllability of Dynamical Systems. Presented to : Academic Weekly Sessions of Bagher Menhaj Students 2010, Nov 22. Presented by: S. M. Dibaji , IEEE Member B. Sc. Student of of Applied Math B. Sc. in Electrical Engineering(Control)

E N D
A Review on Controllability of Dynamical Systems Presented to : Academic Weekly Sessions of BagherMenhaj Students 2010, Nov 22 Presented by: S. M. Dibaji, IEEE Member B. Sc. Student of of Applied Math B. Sc. in Electrical Engineering(Control) M.Sc. Student of Electrical Engineering(Control) Supervisors : Prof. Amir AbolfazlSuratgar Prof. Mohammad BagherMenhaj
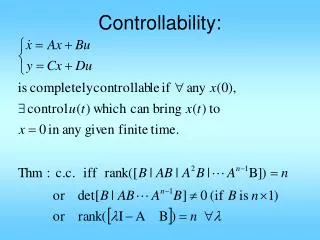
WhatisControllability? • Controllabilityis one of the system’scharacteristics . • It expresses whether the system dynamic has the ability to steerfrom one state to another state by settling the admissible controls!? • In otherwords, Is it possible to do a transfer the system states fromassumed initial state?
The Most Philosophical Question From the System Is it possible? Maybeyoucan’tbelieve but controllabilityanalysisasksthis essential question from the system. If the system iscontrollableitis possible to expectit to do ourdesiredbehaviour. Whenwesayitislocallycontrollable, in fact, itcan do special jobs by availableoppurtunites.
Controllabilityproblems has inherentcomplexity • Since the controllability question is about the existence of admissible control(input) to be able to steer the state of the systems to desiredregion, It canbe the mostdifficultproblem in the world of mathematicsratherthan world of control. ( There are someoverlapsbetweenthesetwowideworlds.) • The question of controllabilitylikestabilityrefers to mathematical nature of system dynamic
Start x1 System Add u x2 x3 Goal Controllability Concept Add u x0 Add u xf Add u دانشکده مهندسی برق دانشگاه صنعتی امیرکبیر
A More Realistic Example Consider a box with several balls in it. A baby roles in a box as a control (input), and balls role as states. Everey new situation of balls positions is affected only baby is obviously is hands and legs( controls). We say the box and balls System is controllable if we Can always fine an admissible Sequence of baby movements to new situation of balls(states) in the box.
Rudolf Emil Kalman Controllability Idea: Rudolf Emil Kalman ”On the general theory of control systems” First International Congress on Automatic Control, Moscow 1960 “This paper initiates study of pure theory of control “
Theoratical Framework
Linear Time Invariant Systems C.T.Chen and Niedereslki 1966
Rosenbrock Matrix • Rosenbrock Matrix: (A,B) is controllable iff R has full row rank
PBH Criterion • PBH( Popov-Belevitch-Hautus) Citerion: • (A,B) is controllable iff P has full row rank for all s.
Controllability of LTI Properties • (A,B) is controllable iff (A+BK,B) is controllable • (A,B) is controllable iff the equivalent system is controllable : • Duality with Observability • Check with Matlab: Ctrb(A,B) is the controllability matrix of A, B
Problem with Rank • All the criterion needs to check the rank of matrix, • R.D. Lemma: • The matrix M has full row rank iff MM’ is nonsingular.
Linear Time Varying • The Controllability depends on the nonsingularity of the below matrix: If D=0, P is nonsingular iff (A,B) is controllable in (t0,tf) If D is not zero, the nonsingularity of below matrix is necessary and sufficient:
CSLHS • What is CSLHS? • It stands for Controlled Switching Linear Hybrid System
Yang Controllability Conditions for CSHLS (2002) Theorem 1: Sufficiency If the above controllability matrix has full row rank, the CSLHS is controllable.
References [1] Zhenyu Yang “An Algebraic Approach Towards the Controllability of Controlled Switching Linear Hybrid Systems” Automatica 38 (7), pp 1221-1228,2002 [2] Kazuo Tanaka, Hua O. Wang, Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality Approach, John Wiley & Sons, Inc. 2001.
Your Ideas, Questions , and Guidance Thanks for your warmly attention