Download
1 / 21
210 likes | 238 Views
Learn about describing rotation, torque, rotational inertia, center of mass, and stability. Explore examples and equations for rotational dynamics in this informative study guide.

E N D
8 Rotational Motion • describing rotation & “2nd Law” for rotation • conserved rotations • center of mass & stability • Homework: • RQ: 1,2, 6, 7, 13, 14, 16, 18, 20, 23, 32. • Ex: 22, 40, 47. • Problem: 3.
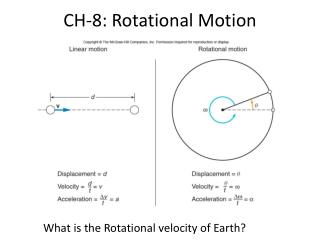
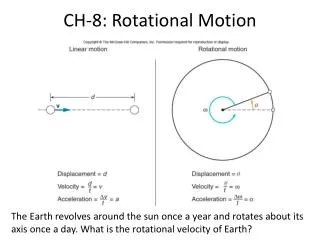
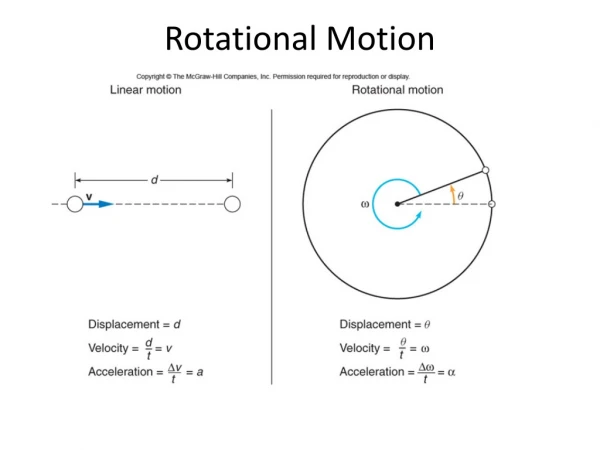
Describing Rotation • speed on rotating object ~ distance from center (v ~ r) • however, all points on object have same #rotations/second (v/r is same) • rotational speed = v/r • “direction”: clockwise or counter-clockwise
torque • torque = force x lever-arm • lever-arm determined by force-line as shown below
torque examples • large torque: • lever-arms = r • zero torque: • lever-arms = 0
rotational inertia • translational inertia depends only on the mass of the object • rotational inertia depends on mass, shape, and size. • bigger objects tend to have higher rotational inertias • e.g. tightwalker uses long pole for balance.
high rotational inertia • improves stability of rotating objects • Examples: turntable platter, bicycle wheel, frisbee
Example Torque • Meter stick balanced from 50cm • Hang 200grams from 30cm • Lever-arm = 20cm • ?Torque? Force x lever-arm = weight of 200 grams x 20cm ~ 200grams x 20cm = 4000gram-cm • Where can we put 100grams so that it balances the meter stick?
Pract. Phys. p.42 #2. • 2a) twice the lever-arm, W = 250NCCW-torque = 250Nx4m = 1000mNCW-torque = 500Nx2m = 1000mN • Rotational Equilibrium is state when CCW and CW torques are equal. • We also say that the “sum of the torques” is zero for Rot. Eq.
Cont. • 2b) 4/3 weight ratio, what is lever-arm? • CCW-torque = 300Nx4m=1200Nm • CW-torque = 400Nx??m = 1200Nm • => 3m balances the see-saw.
Cont. • 2c) weight of board balances child. • CCW-torque = 600Nx1m = 600Nm • CW-torque = ??Nx3m = 600Nm • ??N = 600Nm/3m = 200N
angular momentum • linear momentum:(linear inertia) x (linear velocity) = mv • angular momentum:(rotational inertia) x (rotational velocity) • conserved when net external torque is zero
isolated rotation • (rotat. inertia) x (rotat. velocity) = constant • skater, diver, gymnast “tuck” to spin faster, “open” to spin slower
center of mass • average location of object’s mass • at center of symmetrical objects (hoop, ball, rod) • affects stability (rollover risk ~ height of center of mass)
center of mass • closer to more massive object • equal to “center of gravity” (for small system)
stability • tendency to maintain position • center of mass must be above base
wine rack • where is the center of mass?
equilibrium • condition of Fnet = 0 & net torque = 0 • stable objects are in equilibrium • not all equilibriums are stable
centripetal force • force required to maintain curved motion • points toward center of curvature
centrifugal force (p44 #1, #3) • not a force on object • opposite of centripetal • apparent force due to inertia • e.g. ball (or water) in a spinning bucket “feels” a force holding it to the bottom.
Practicing Physics • P46 circular motion • P48 rotational dynamics
Summary • angular velocity = v/r • torque = force x lever-arm • rotational inertia = ‘rotational mass’ • angular momentum of isolated systems is conserved • definitions: center of mass, stability, equilibrium • centripetal & centrifugal forces