Download
1 / 1
10 likes | 139 Views
Driving Control using Machine Vision A Final Year Project. Results. Introduction.

E N D
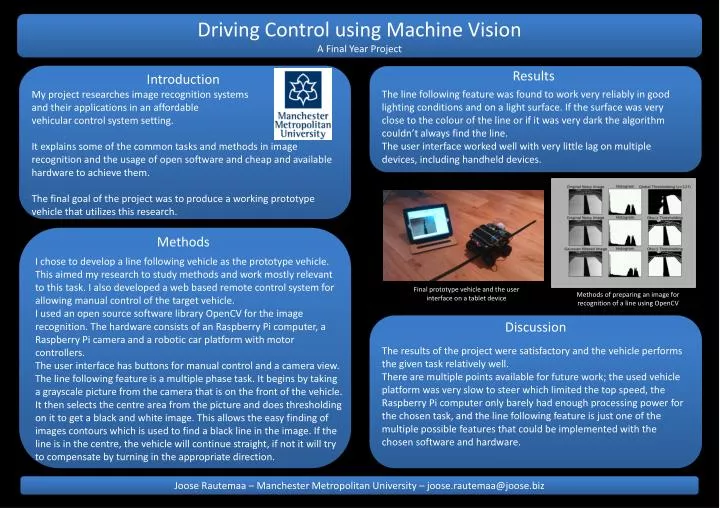
Driving Control using Machine Vision A Final Year Project Results Introduction The line following feature was found to work very reliably in good lighting conditions and on a light surface. If the surface was very close to the colour of the line or if it was very dark the algorithm couldn’t always find the line. The user interface worked well with very little lag on multiple devices, including handheld devices. My project researches image recognition systems and their applications in an affordable vehicular control system setting. It explains some of the common tasks and methods in image recognition and the usage of open software and cheap and available hardware to achieve them. The final goal of the project was to produce a working prototype vehicle that utilizes this research. Methods I chose to develop a line following vehicle as the prototype vehicle. This aimed my research to study methods and work mostly relevant to this task. I also developed a web based remote control system for allowing manual control of the target vehicle. I used an open source software library OpenCV for the image recognition. The hardware consists of an Raspberry Pi computer, a Raspberry Pi camera and a robotic car platform with motor controllers. The user interface has buttons for manual control and a camera view. The line following feature is a multiple phase task. It begins by taking a grayscale picture from the camera that is on the front of the vehicle. It then selects the centre area from the picture and does thresholding on it to get a black and white image. This allows the easy finding of images contours which is used to find a black line in the image. If the line is in the centre, the vehicle will continue straight, if not it will try to compensate by turning in the appropriate direction. Final prototype vehicle and the user interface on a tablet device Methods of preparing an image for recognition of a line using OpenCV Discussion The results of the project were satisfactory and the vehicle performs the given task relatively well. There are multiple points available for future work; the used vehicle platform was very slow to steer which limited the top speed, the Raspberry Pi computer only barely had enough processing power for the chosen task, and the line following feature is just one of the multiple possible features that could be implemented with the chosen software and hardware. Joose Rautemaa – Manchester Metropolitan University – joose.rautemaa@joose.biz