Download
1 / 167
1.67k likes | 1.85k Views
Shape-Representation. and. Shape Similarity. Motivation. WHY SHAPE ?. Motivation. We’ve seen this already in the introduction of this course: These objects are recognized by…. Motivation. These objects are recognized by…. Motivation. Shape is not the only, but a very

E N D
Shape-Representation and Shape Similarity
Motivation WHY SHAPE ?
Motivation We’ve seen this already in the introduction of this course: These objects are recognized by…
Motivation These objects are recognized by…
Motivation Shape is not the only, but a very powerful descriptor of image content
Why Shape ? Several applications in computer vision use shape processing: • Object recognition • Image retrieval • Processing of pictorial information • Video compression (eg. MPEG-7) … (Reminder: this course focuses on object recognition and image retrieval)
Blobworld Example 1: Blobworld http://elib.cs.berkeley.edu/photos/blobworld/start.html BLOB = “Binary Large Object”, “an indistinct shapeless (really ?) form”
Blobworld Description of Blobworld: PROJECT !
ISS Database Example 2: ISS-Database http://knight.cis.temple.edu/~shape
ISS Database ISS: Query by Shape Sketch of Shape Query: by Shape only Result: Satisfying ?
ISS Database The ISS-Database will be topic of this tutorial
Overview • Overview • Why shape ? • What is shape ? • Shape similarity • (Metrices) • Classes of similarity measures • (Feature Based Coding) • Examples for global similarity
Why Shape ? Why Shape ? • Shape is probably the most important property that is perceived about objects. It allows to predict more facts about an object than other features, e.g. color (Palmer 1999) • Thus, recognizing shape is crucial for object recognition. In some applications it may be the only feature present, e.g. logo recognition
Why Shape ? • Shape is not only perceived by visual means: • tactical sensors can also provide shape information that are processed in a similar way. • robots’ range sensor provide shape information, too.
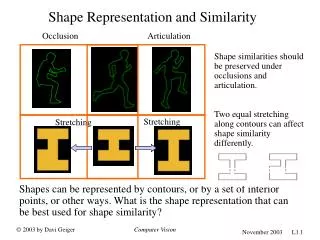
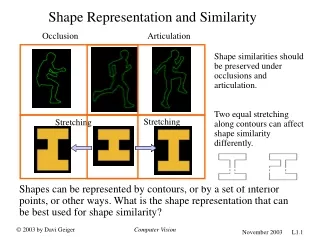
Shape • Typical problems: • • How to describe shape ? • What is the matching transformation? • No one-to-one correspondence • • Occlusion • • Noise
Shape • Partial match: only a part of the query appears in a part of the database shape
What is Shape ? • What is Shape ? • Plato, "Meno", 380 BC: • "figure is the only existing thing that is found always following color“ • "figure is limit of solid"
What is Shape ? … let’s start with some properties easier to agree on: • Shape describes a spatial region Shape is a (the ?) specific part of spatial cognition • Typically addresses 2D space
What is Shape ? • 3D => 2D projection
What is Shape ? • the original 3D (?) object
What is Shape ? Moving on from the naive understanding, some questions arise: • Is there a maximum size for a shape to be a shape? • Can a shape have holes? • Does shape always describe a connected region? • How to deal with/represent partial shapes (occlusion / partial match) ?
What is Shape ? Shape or Not ? Continuous transformation from shape to two shapes: Is there a point when it stops being a single shape?
What is Shape ? But there’s no doubt that a single, connected region is a shape. Right ?
What is Shape ? A single, connected region. But a shape ? A question of scale !
What is Shape ? • There’s no easy, single definition of shape • In difference to geometry, arbitrary shape is not covered by an axiomatic system • Different applications in object recognition focus on different shape related features • Special shapes can be handled • Typically, applications in object recognition employ a similarity measure to determine a plausibility that two shapes correspond to each other
Similarity So the new question is: What is Shape Similarity ? or How to Define a Similarity Measure
Similarity Again: it’s not so simple (sorry). There’s nothing like THE similarity measure
Similarity which similarity measure, depends on which required properties, depends on which particular matching problem, depends on which application
Similarity …which application Simple Recognition (yes / no) ... robustness Common Rating (best of ...) Analytical Rating (best of, but...) ... invariance to basic transformations
Similarity …which problem • computation problem: d(A,B) • decision problem: d(A,B) <e ? • decision problem: is there g: d(g(A),B) <e ? • optimization problem: find g: min d(g(A),B)
Similarity …which properties: We concentrate here on the computational problem d(A,B)
Similarity Measure • Requirements to a similarity measure • Should not incorporate context knowledge (no AI), thus computes generic shape similarity
Similarity Measure • Requirements to a similarity measure • Must be able to deal with noise • Must be invariant with respect to basic transformations Next: Strategy Scaling (or resolution) Rotation Rigid / non-rigid deformation
Similarity Measure • Requirements to a similarity measure • Must be able to deal with noise • Must be invariant with respect to basic transformations • Must be in accord with human perception
Similarity Measure Some other aspects worth consideration: • Similarity of structure • Similarity of area Can all these aspects be expressed by a single number?
Similarity Measure • Desired Properties of a Similarity Function C • (Basri et al. 1998) • C should be a metric • C should be continous • C should be invariant (to…)
Properties Metric Properties S set of patterns Metric: d: S ´ S ® R satisfying 1. Self-identity: " xÎS, d(x,x)=0 2. Positivity: " x ¹yÎS, d(x,y)>0 3. Symmetry: " x, yÎS, d(x,y)= d(y,x) 4. Triangle inequality: " x, y, zÎS, d(x,z)£d(x,y)+d(y,z) • Semi-metric: 1, 2, 3 • Pseudo-metric: 1, 3, 4 • S with fixed metric d is called metric space
Properties • Self-identity: " xÎS, d(x,x)=0 • Positivity: " x ¹yÎS, d(x,y)>0 • …surely makes sense
Properties • In general: • a similarity measure in accordance with human perception is NOT a metric. This leads to deep problems in further processing, e.g. clustering, since most of these algorithms need metric spaces !
Properties • Some more properties: • One major difference should cause a greater dissimilarity than some minor ones. • S must not diverge for curves that are not smooth (e.g. polygons).
Similarity Measures • Classes of Similarity Measures: • Similarity Measure depends on • Shape Representation • Boundary • Area (discrete: = point set) • Structural (e.g. Skeleton) • Comparison Model • feature vector • direct
Feature Based Coding Feature Based Coding (again…) This category defines all approaches that determine a feature-vector for a given shape. Two operations need to be defined: a mapping of shape into the feature space and a similarity of feature vectors. Representation Feature Extraction Vector Comparison
Vector Comparison • We’ve done this already with • histograms, • fourier spectra, • shape features (centroid distance spectrum)
Vector Comparison • Another feature you should have heard of: • (Discrete) Moments • Shape A,B given as • Area (continous) or • Point Sets (discrete)