Download
1 / 25
250 likes | 277 Views
This research delves into shape representation and similarity in computer vision. It focuses on preserving shape similarities under occlusions and articulations. The study explores various representations, such as contours and interior points, aiming to identify the most suitable shape representation for similarity assessment. The approach involves a self-similarity model based on shape axes, using a cost functional to measure shape similarity. The research emphasizes the importance of symmetry and offers a global optimization approach for matching shapes effectively.

E N D
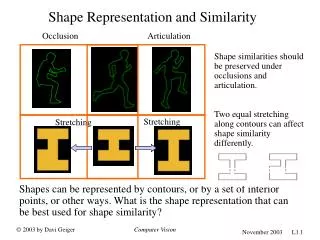
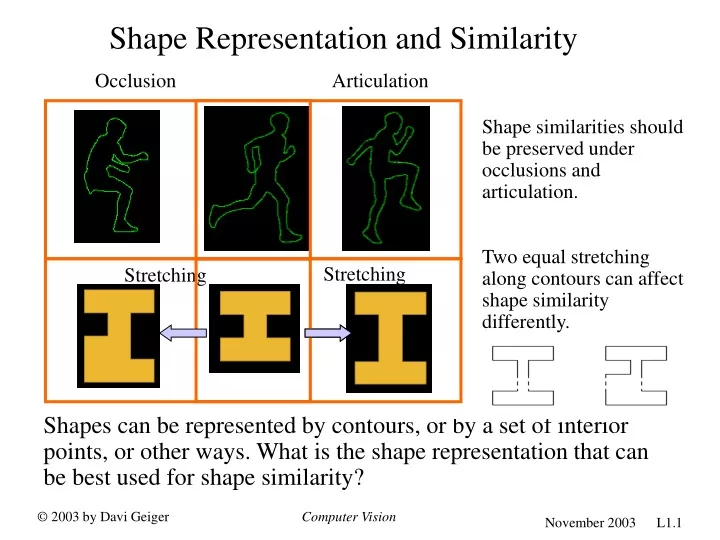
Stretching Stretching Shape Representation and Similarity Occlusion Articulation Shape similarities should be preserved under occlusions and articulation. Two equal stretching along contours can affect shape similarity differently. Shapes can be represented by contours, or by a set of interior points, or other ways. What is the shape representation that can be best used for shape similarity? Computer Vision
Symmetry Axis Representation Shape Shape Axis (SA) SA-Tree Computer Vision
Shape Representation via Self-Similarity Based on work of Liu, Kohn and Geiger • A variationalshape representation model based on self-similarity of shapes. • For each shape contour, first compute its shape axis then derive a unique shape-axis-tree (SA-tree) or shape-axis-forest (SA-forest) representation. Shape Contour Shape Axis (SA) SA-Tree Computer Vision
counterclockwise clockwise The Insight • Use two different parameterizations to compute the represention of a shape. • Construct a cost functional to measure the goodness of a match between the two parameterizations. • The cost functional is decided by the self-similarity criteria of symmetry. Computer Vision
Parameterized Shapes • Two different parameterizations: counterclockwise clockwise • When the curve is closed we have • Matching the curves is described as the match of functions Computer Vision
A Global Optimization Approach • We seek “good” matches over the possible correspondences Computer Vision
Similarity criteria: Symmetry Mirror Symmetry Co-Circularity Computer Vision
A Global Optimization Approach Computer Vision
Constraints on the form of F Computer Vision
Constraints on the form of F (cont.) Computer Vision
Similarity criteria: Symmetry Computer Vision
Similarity criteria: Symmetry II (a) (b) (c) (d) Computer Vision
Summary: Cost Functional/Energy Density • Structural properties • Symmetric • Parameterization Independent • Geometrical properties • Translation invariant • Rotation invariant • Scale “almost” invariance • Self-Similarity properties Computer Vision
A Dynamic Programming Solution Computer Vision
bifurcation ! tt ! … ! ! ! ! bifurcation ! 1-tt A Dynamic Programming Solution The recurrence is on the “square boxes”. Each box is either linked to one inside square box or linked to a pair of inside and well aligned square boxes (leading to bifurcations). Assumption, that will not be needed later: The final state is a match (0,0). 1-s ! ! ! ! ! t+1/N ? t s s+1/N 1-t Computer Vision
A Dynamic Programming Solution 1-s tt t+1/N t t ! ! … ! ! ! ! ! ? s s 1-tt s+1/N 1-t Computer Vision
A Dynamic Programming Solution t A few more steps … Starting states (matching candidates). All corresponding to “self-matches” iteration direction s Computer Vision
A General Dynamic Programming Solution t Extend the parameters s and t such that negative values x s,t=1+x. s x Extended Graph x No need to force a match at (0,0) or any particular node/match. Starting states (matching candidates). All corresponding to “self-matches” Ending states Computer Vision
A Dynamic Programming Solution Computer Vision
Shape Shape Axis SA-Tree Experimental Results for Closed Shapes Computer Vision
Shape Shape Axis (SA) SA-Tree Experimental Results for Open Shapes (the first and last points are assumed to be a match) Computer Vision
Experimental Results for Open Shapes Shape Axis (SA) SA-Forest Computer Vision
Matching Trees with deletions and merges for articulation and occlusions Computer Vision
Experimental Results for Open Shapes Computer Vision
Convexity v.s. Symmetry White Convex Region Black Convex Region Computer Vision