Download

1 / 26
260 likes | 361 Views
Translation of sign language to speech. Michael Abd-El-Malak Student ID: 12045132 Supervisor: Iain Murray. Presentation outline. The requirements of translating level 2 ASL Problem outline and project objectives The proposed system Achievements and results Conclusion.

E N D
Translation of sign language to speech Michael Abd-El-Malak Student ID: 12045132 Supervisor: Iain Murray
Presentation outline • The requirements of translating level 2 ASL • Problem outline and project objectives • The proposed system • Achievements and results • Conclusion
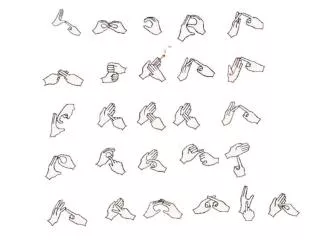
Level 2 ASL: Hand position and roll • In many cases hand movement and roll are necessary for correct word disambiguation. • Example: Roll required to differentiate between ‘weigh’ and ‘balance’
Level 2 ASL: Facial feature extraction • ASL to English translation is a very difficult task. • Facial expressions and head movement convey lots of added information. • Moving eyebrows up at the end of a phrase indicates a question. • Shaking the head implies the opposite. • By using facial feature tracking shorter phrases can be used.
The problem • To track the hand with 4 degrees of freedom • x, y & z coordinates • Hand roll • To extract the positions of the facial features to facilitate feature tracking • Pupils • Eyebrows
Project Objectives • Develop a system that can simultaneously track the hand(4 DOF) and facial features which is: • As non obtrusive as possible • Portable • Real time • Robust • Cost efficient
Proposed System • Based on the input from a 720 x 540 CCD video camera. • Uses a glove with infrared LEDs to track the hand. • Uses Neural networks to find the facial features. Position list Tracking System Head locator IR LED controller
Tracking the hand: Overview • The hand position is tracked through the use of infrared LEDs which are used as optical trackers. • Six IR LEDs are required for each hand. • The IR LEDs are sequentially turned on and off in synchronisation with the camera. • Single detection cycle requires 8 frames.
Tracking the hand: Example LED On
Tracking the hand: Problems faced • Infrared LEDs have small viewing angles. • LED intensity can be very weak. • Requires good noise suppression. • People don’t remain still, even if they’re trying to. • Results in a ghostly outline of the person appearing in the difference image. • Can be removed using differences from other frames. • Low pass filtering • Reflective items such as glasses can look very similar to LEDs turned on. • Use a proximity filter to remove outlier points. • Not enough information to obtain z location. • Requires stereo vision.
Facial feature extraction: Overview • Detection is done via neural networks. • Non-linear two layer perceptron structure used. • Most commonly used structure for pattern recognition. • 256 inputs are used which are obtained using a log-polar mapping around the sampling position.
Facial feature extraction: Problems faced • Number of inputs • 256 • 128 is too undependable • Size of the sampling structure • ≈ face size→ Predicts the feature position • ≈ eye → Simply looks for dark spots • ≈ eye separation → Best results
Results: Performance summary • Hand tracking system • Position and pitch determined in 3 seconds • X,Y coordinate is accurate to within 20 pixels • Pitch is accurate to ± 10 degrees • Facial feature extraction system • Eyes, eyebrows and left eye edge located in 20 seconds • Generally all features are located with an accuracy of ± 20 pixels (720 x 540)
Results: Facial feature localisation Eyebrow Pupil Left corner of eye • Ideal conditions
Results: Hand tracking system • Out of focus image • Reflection on the pupil • Pupils and right brow slightly off
Results: Facial feature localisation • Detection with an angled face
Results: Facial feature localisation • Matches each side correctly
Summary and future work • A system was developed that is capable of tracking the hand position and roll, extract the position of the eyes & eyebrows. • Further work is required: • Add more features such as lips • To implement stereovision • To further optimize the algorithms • To implement the whole system in hardware
Thank you for your attentionAny questions? “The best way to predict the future is to invent it” Alan Kay
W1 x1 W2 x2 W3 x3 ∑ TF xn Wn Bias Artificial neural networks in 60 seconds Hidden layer Inputs Output • Simple feed-forward network, no recurrence • Choice of transfer function critical • Above is an example of a perceptron structure • Statistical template is embedded in weights