Download
1 / 14
170 likes | 664 Views
Resource and Resource Access Control. Fred Kuhns Applied Research Laboratory Computer Science and Engineering Washington University in St. Louis. Blocking Time. Higher priority job is blocked by a lower priority job during a nonpreemptive interval: priority inversion . Nonpreemptivity:

E N D
Resource and Resource Access Control Fred Kuhns Applied Research Laboratory Computer Science and Engineering Washington University in St. Louis
Blocking Time • Higher priority job is blocked by a lower priority job during a nonpreemptive interval: priority inversion. • Nonpreemptivity: • bi(nb) = max(qk), i+1 k n, qk ei • Self-Suspension • bi(ss) = max SS of Ti + sum[min(ek, max SS of Tk),k=1 to k=(i-1)] • Context Switch • bi(cs) = 2CS CS523 – Operating Systems
i - 1 t ek k = 1 pk wi(t) = ei + bi(ss) + (Ki + 1)bi(np) + 2(Ki + 1)CS + Time Demand Analysis • Updated TDA equation to include blocking time. • But what about resource contention? CS523 – Operating Systems
Effects of Resource Contention • Add new term for blocking • bi(rb) • Priority Inversion • Uncontrolled priority inversion • Timing Anomalies • Resulting from priority inversion • Deadlock • Circular wait CS523 – Operating Systems
Resource Access Protocols • Resource Access protocol • Granting resource access requests • Scheduling of jobs which request resources • Goals: • Bound delay due to Priority Inversion and Timing Anomalies • Prevent Deadlock • Three Examples: • Nonpreemptive Critical Sections • No deadlock, No uncontrolled Priority Inversion • Priority Inheritance Protocol • Deadlock, No uncontrolled Priority Inversion • Priority Ceiling Protocol • No deadlock, No uncontrolled Priority Inversion CS523 – Operating Systems
Some Notation • Ji is the ith job in Task T. Shorthand for Jji • i = Assigned priority of Job Ji; i(t) = current priority of Ji • If the decision to change the priority of Job Ji is made at t = t1 then • t- = t - and t+ = t + ; • i(t1-) = priority at and immediately before t1, • i(t1+) = priority immediately after the priority change • = nonexistent priority, lower than the lowest priority • At time t1 Job Ji requests resource Rk. • Rk Jl: Resource Rk is held by Job Jl • Ji Rk: Ji blocked onRk (Ji Rk Jl) • General scheduling and allocation assumptions: • Scheduling Rules: • Ready Jobs scheduled on processors preemptively in a priority driven manner according to their current priorities, i(t). • At Job release time the priority is equal to its assigned priority: if Ji released at t’, then i(t’) = i • Resource allocation: • If a resource is free then it is allocated when requested • if not free then the request is denied and the requesting job is blocked CS523 – Operating Systems
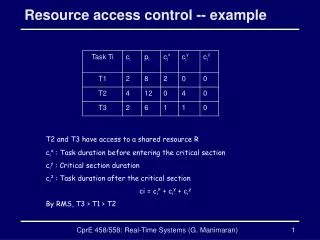
Nonpreemptive Critical Sections Protocol • Blocking time is bounded:bi(rc)=max(ck) for k = i+1,...,n andck is the max critical section time of any job in task Tk. • NCSP Rule: • If Ji holds a resource it effectively has the highest priority in the system: i.e. it will not be preempted while holding a resource. So no deadlock. • Assessment: • Advantage: simple and does not require prior knowledge of resource usage. Bounds delays and prevents deadlock. • Disadvantage, every job can be blocked by a lower priority job regardless of whether it contends for the same resources. CS523 – Operating Systems
Priority Inheritance Rules (PI) • Scheduling Rule: consistent with assumptions • Allocation Rule: consistent with assumptions • Priority-Inheritance Rule: if Ji Rk Jl and l(t1-) < i(t1) then l(t1+) = i(t1) until Jlreleases Rkwhen l(t2+) = l(t1-) • Assessment: • simple and works with any priority driven scheduler. Does not require foreknowledge. When no deadlock, no unbounded delay. • Two types of blocking: Direct and Priority Inheritance blocking • PI has the transitive property. • Does not result in minimal blocking time • Does not prevent deadlock CS523 – Operating Systems
Basic Priority Ceiling Rules • Extends PI to prevent deadlock and reduce blocking time • Assumptions: • general scheduling rule; fixed assigned priorities; resource requirements of tasks known • (Rk)=priority ceiling for Rk=max(i) for all Ji requiring Rk • System priority ceiling = (t)=max[(Rk)] for all Rk in use at time t. If no resource in use then (Rk) = • Allocation Rule (Ji requests Rk at time t=t1): • if Ji Rk Jl at t = t1 then block Ji (no change) • else (Rk free at t1) if i(t1) > (t), then Rk Ji else if for some Rx Jiand (Rx) = (t1), then Rk Ji else deny and block (Ji Rk) • Priority-Inheritance Rule: • if Ji blocks on resource Rk held by Jl (Ji Rk)(note: RkJl and l(t1-)=priority of Jl at t = t1-)then l(t1+) = i(t1) (inherited priority) until Jlreleases all Rxwith (Rx) (t1) at t = t2 , l(t2+) = l(t1-) CS523 – Operating Systems
Ji R Jk Jh R Jl Comparisons • Priority Ceiling • No deadlocks: Priority ceilings impose order on resources • bounded blocking time by at most the duration of one critical section. • Priority inheritance is greedy while priority ceiling is not • If π (t) of a Job J is > (t) then neither J nor any other job with priorities ≥ π (t) need any resource currently in use. Jk Directly Blocked Priority Inheritance blocking high priority job block by lower priority job that inherited a higher priority. πh>πl, πk>πl and πh>πk. But the current priority of Jl, πh(t)=πh so Jk is blocked from running. Ji R X Jk Avoidance Blocking (Priority Ceiling Blocking) (X) ≥ πi(t) CS523 – Operating Systems
Stack-Based Priority Ceiling Protocol • Update Current Ceiling in the usual manner • When no resources are held the (t) = • otherwise, (t) = max[(Rk)] for all Rk in use at time t. • Scheduling Rule: • when Ji released it is blocked until its assigned priority = i(t) > (t) • When not blocked jobs are scheduled in a priority-driven, preemptive manner according to their assigned priorities. • Allocation Rule: • Allocate when requested CS523 – Operating Systems
Stack-based Priority Ceiling • Assume jobs never self suspend • After a job is released, when it begins to execute all the resources it needs are free • no job is ever blocked once its execution begins • when a job is preempted, all the resources needed by the preempting job are available • deadlock will not occur • Has the same worst-case performance as the basic priority ceiling protocol CS523 – Operating Systems
Ceiling-Priority Protocol • Update Current Ceiling in the usual manner • If jobs never self suspend then the stack-based priority-ceiling and ceiling-priority protocols produce the same schedules. • maximum blocking time is same as stack-based and basic priority ceiling protocols. • Scheduling Rule: • No resources held then schedule according to assigned priorities (Ji has priority i(t) = i). Jobs with same priority are scheduled in FIFO order. • When a job, Ji, holds one or more resources then its priority i(t) = max((Rx)) for all resource Rx held by Ji • Allocation Rule: • Allocate when requested CS523 – Operating Systems
Comparison • worst case performance of stack-based and basic ceiling protocols are the same • stack-based version • supported by the Real-Time systems Annex of Ada95 • Jobs must not self-suspend • when jobs do not self-suspend, stack-based and ceiling-priority protocols yield the same schedules. • stack-based and ceiling-priority have the same worst-case blocking time. CS523 – Operating Systems