Download
1 / 4
40 likes | 61 Views
Learn the principles of equilibrium for rigid bodies in three dimensions. Understand how to solve for unknown forces and moments using scalar and vector equations in statics. Explore roller-support, ball-and-socket, hinged, and built-in supports for different constraints on translations and rotations.

E N D
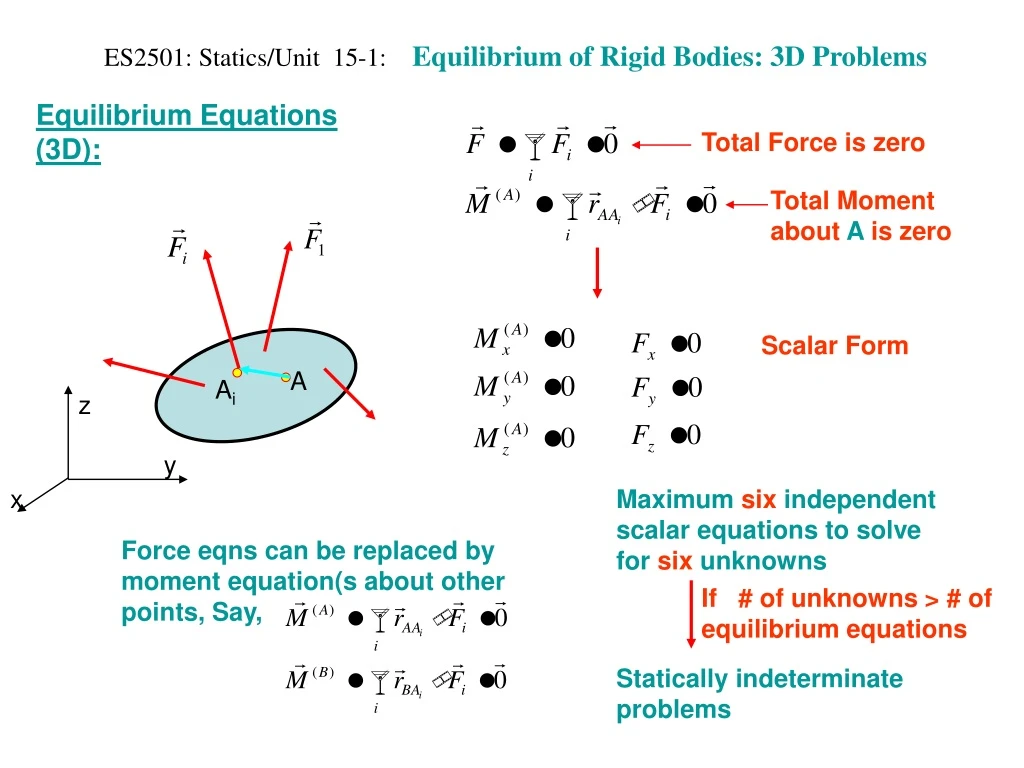
Equilibrium Equations (3D): Total Force is zero ES2501: Statics/Unit 15-1: Equilibrium of Rigid Bodies: 3D Problems Total Moment about A is zero Scalar Form A Ai z y x Maximum six independent scalar equations to solve for six unknowns Force eqns can be replaced by moment equation(s about other points, Say, If # of unknowns > # of equilibrium equations Statically indeterminate problems
ES2501: Statics/Unit 15-2: Equilibrium of Rigid Bodies: 3D Problems Basic Procedures of Static Analysis Step 1: Draw free-body diagram(s); Step 2: List equilibrium equations; Step 3: Any supplementary equations? (for statically indeterminate problems); Step 4: Solution; Step 5: Interpretation.
Roller-support Constrains of 3D Support (reactions): (See Table 5.1) ES2501: Statics/Unit 15-3: Equilibrium of Rigid Bodies: 2D Problems Only translations in z- direction is restricted, No rotation freedoms restricted. Ballard socket Support: Translations in any direction is restricted, No rotation freedoms restricted. Hinged support Only rotation about the x-axis is allowed Build-in Support: Bearing support Both translations and rotations in all direction are restricted, Only rotation about And translation along the x-axis are allowed
A square plate with side of 200 mm is hinged at both A and B and supported by a cable to a hook E on the wall. The plate is held horizontally. A force of 400 N is applied at D downwards. Assume that hinge A doesn’t restrict motion in the hinge axis. Example 1: y ES2501: Statics/Unit 15-4: Equilibrium of Rigid Bodies: 2D Problems B(0,0,0) (Hinges are well aligned such that no extra couple on the plate) E(0, 80,100) Step 1: FBD (See the figure) C(200,0,0) Step 2: List Equilibrium equations. x A(0,0,200) Reaction at A Zero total force z Reaction at B D(200,0,200) Zero total moment about B Tension in cable CE (sign convention) Step 3: Solution 6 equations for 6 unknowns



















