Download
1 / 29
300 likes | 476 Views
Transformations Between Surfaces With Animations. Vesna Veličković Eberhard Malkowsky Faculty of Science and Mathematics, University of Ni š , Srbija i Crna Gora. 6 th ISNM NSA NIŠ '2003 August 24 - 29, 2003 Faculty of Mechanical Engineering , Ni š. Surfaces of Revolution.

E N D
Transformations Between Surfaces With Animations Vesna Veličković Eberhard Malkowsky Faculty of Science and Mathematics, University of Niš, Srbija i Crna Gora 6th ISNM NSA NIŠ '2003 August 24 - 29, 2003 Faculty of Mechanical Engineering, Niš
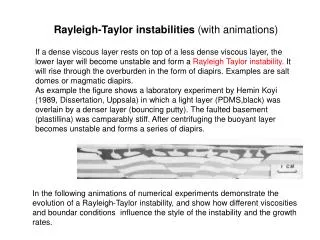
Spherical and Pseudo-spherical Surfaces of Revolution Surface of revolution are generating by rotation a curve about the x3- axes. Surface of revolution with constant Gaussian curvature K>0 or K<0 are spherical or pseudo-spherical surfaces of revolution. (theory)
Spherical Surfaces of Revolution • Special case: sphere • Hyperbolic spherical surface of revolution • Elliptic spherical surface of revolution (animation)
Pseudo-spherical Surfaces of Revolution • Parabolic pseudo-spherical surface of revolution • Hyperbolic pseudo-spherical surface of revolution • Elliptic pseudo-spherical surface of revolution
Classifications of Maps A map F:SS* is called • isometric if the length of every arc on S is the same as that of its corresponding image • conformal or angle preservingif for any pair of curves on S the angle between them is the same as the angle between their images. • area preservingif anypart of S is mapped onto a part of S* with the same surface area.
Isometric Maps Theorem. A map F:SS* is isometric iff their first fundamental coefficients gik and g*ik with respect to the same parameters (uj) and (u*j) satisfy gik (uj) = g*ik (u*j) for i,k=1,2. In particular, the Gaussian and geodesic curvature of a surface are invariant under isometric maps. Since a sphere of radius r have Gaussian curvature K = 1/r, and a plane K = 0, no part of a sphere can be mapped isometrically into a plane.
Ruled Surfaces Ruled surfaces play an important role in the theory of isometric maps. A ruled surface is a surface that contains a family of straight linesegments. It is generated by moving vectors along a curve. Examples: • Plane • Cylinder • Cone • hyperboloid of onesheet • hyperbolic paraboloid
Torse A torse is a ruled surface which has the same tangent plane at every point of each of its generating straight lines. Examples: planes, cylinders, cones. Theorem.A surface of class Cr (r>1) is part of a torse if and only if it hasidentically vanishing Gaussian curvature. Theorem.A sufficiently small part of a surface of class Cr (r>2) can be mapped isometrically into a plane if it is part of a torse.
Conformal Maps Theorem. A map F:SS* is conformal iff their first fundamental coefficients gik and g*ik with respect to the same parameters (uj) and (u*j) are proportional, that is if they satisfy g*ik (u*j) = p(uj)gik (uj) for i,k=1,2 and p>0. Every isometric map is conformal. Theorem. Every surface of class Cr (r>2) can be mapped conformally into a plane.
Cartography The problem of mapping a sphere to a plane arises in cartography. No length preserving maps exit from a sphere to a plane. Here we consider two conformal maps from a sphere into a plane • the stereographic projection (for pole area) • the Mercator projection (for equator area).
Stereographic Projection ofa Loxodrome on a Sphere The stereographic projection of a loxodrome (a curve on a surface that intersects each coordinate line in one family at a constant angle) on a sphere is a logarithmic spiral. This is clear since stereographic projection is angle preserving.
The Mercator projection • Conformal • The images of the parallels and meridians of a sphere are straight lines • The distance between the parallels increases as they approach the poles.
Area Perserving Maps Theorem. A map F:SS* is area preserving iff the determinants g an g* of their first fundamental coefficients gik and g*ik with respect to the same parameters (uj) and (u*j) are equal, that is if they satisfy g*(u*j) = g (uj). Theorem. • Every isometric map is area preserving • Every conformal and area preserving map is isometric.
The Lambert Projection • Area preserving • The images of the parallels and meridians of a sphere are straight lines • The meridians are equidistant and the distance between the parallels decreases as they approach the poles.
Linear Transformation from a Circle to a Straight Line Segment
The main purpose of our software We use our own software for geometry and differential geometry [1]. The main purpose of our software is to visualize the classical results in geometry and differential geometry on PC screens, plotters, printers or any other postscript device, but it also has extensions to physics, chemistry, crystallography and the engineering sciences. To the best of our knowledge, no other comparable, comprehensive software of this kind is available. [1] E. Malkowsky, W. Nickel, Computergrafik in der Differentialgeometrie, Vieweg-VerlagBraunschweigWiesbaden,1993
The main concepts of our software • Strict separation of geometry from the technique of drawing. • Line graphics (contour). • Central projection. • Independent visibility check. • The software is open meaning that its source files are accessible in Pascal. The users may apply it in the solution of their own problems. This makes it extendable and flexible and applicable to research. • Object-oriented programming.