Download
1 / 19
190 likes | 353 Views
11. 2. 9. 5. 2. 3. 8. 3. 11. 9. 8. 5. Optimal Sequencing of Traffic Streams at a Signalized Intersection. Peter G. Furth Dept. of Civil & Environmental Engineering Northeastern University, Boston, MA Visiting Scholar at ULB, 2004-2005. 11. 2. 2. 2. 9. 9. 5. 5. 5. 9. 2.

E N D
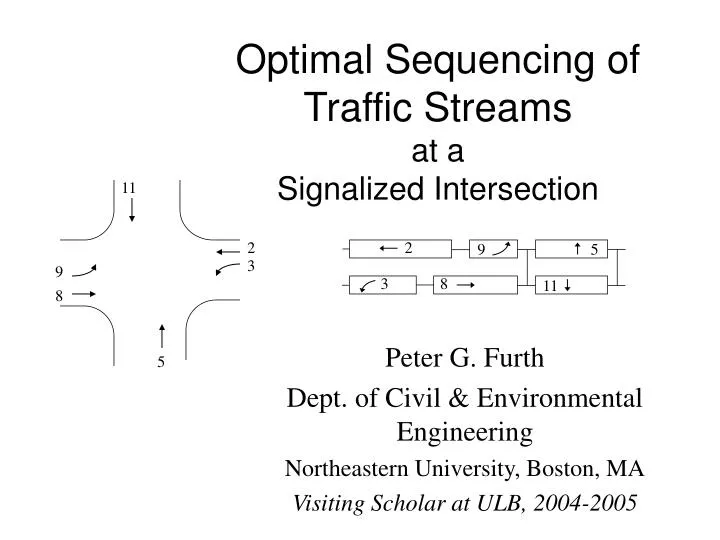
11 2 9 5 2 3 8 3 11 9 8 5 Optimal Sequencing of Traffic Streams at a Signalized Intersection Peter G. Furth Dept. of Civil & Environmental Engineering Northeastern University, Boston, MA Visiting Scholar at ULB, 2004-2005
11 2 2 2 9 9 5 5 5 9 2 3 3 3 8 8 8 3 11 11 11 9 a. 8 5 b. c. Possible Stream Sequences
What Drives the Problem? • Some stream pairs conflict, some don’t • Select optimal sequence for a pre-timed cycle • Objective: minimize cycle length c • Tends to minimize delay to vehicles, pedestrians • Tends to maximize intersection capacity
What Drives the Problem? • Each stream appears exactly once per cycle • Stream i minimum duration: fi + vi c • Pedestrian streams • fi = start-up + crossing time • vi = 0 • Vehicular streams • fi = start-up and yellow lost time (3-4 s) • vi = (traffic volume) / (discharge rate) • Asymmetric clearance time for conflict pairs (typically 0 to 3 s)
9 2 5 11 8 3 Incompatibility Cliques • Maximal groups of mutually conflicting streams • Place lower bound on cycle length • Usually determine minimum cycle length – but not always Arc i-j: i and j are in conflict
2 9 5 arc i-j: i and j are not in conflict 3 8 11 a 2 3 5 d b c 8 9 11 A sequence of stages b a d c Compatibility Cliques • Maximal groups of mutually compatible streams • “Stages” or “phases” • Optimal sequence is usually a sequence of compatibility cliques - but not always
Directed Graph of Conflicts(Activity Graph) • node = stream’s green start • ui = stream i’s start time • arc i-j length = lower bound time, for every conflict 2 9 5 11 • Length of arc i-j depends on (yet undetermined) sequence; can be + or - • Need to parameterize sequence 3 8
If i doesn’t follow j: ui uj uj – ui> aij + vi c i j i' c If i follows j: uj + c uj ui j i j' In general, uj – ui> aij + vi c - Fij c Define: Fij = 1 if i follows j, 0 otherwise Representing Sequence uj – ui> aij + vi c - c
Formulation on Conflict Digraph Decision variables: c, ui, Fij Minimize c s.t. uj – ui> aij + vi c - Fij c (1) time needs Fij = 0 or 1 (2) sequence Fji = 1 – Fij (3) reciprocity c > 0 Non-linear, mixed integer
Solution Approach Branch and Bound • Build B&B tree using conflict cliques • Relaxation that yields a LP • Specialized network simplex to solve relaxations
Building the B & B Tree cliq 3 perm 1 • Node = Conflict clique • Branch = permutation (sequence) for the clique • Permutation specifies Fij’s between the clique’s members perm 2 cliq 2 perm n2! perm 1 cliq 3 perm 2 cliq 1 cliq 3 perm n1! perm 1 perm 2 cliq 2 perm n2! cliq 3
Advantage of Branching on Conflict Cliques • Ex: conflict clique with 4 streams 4! = 24 possible sequences (branches) • Contrast binary branching on Fij’s 4 * (4 - 1) / 2 = 6 conflict pairs 26 = 64 possible sets of F • 40 sets of F violate transitivity, are contradictory • If Fij = 1 and Fjk = 1, it must be that Fik = 1
Branch & Bound RelaxationPosition inB & B tree fixes some Fij’s. For the rest: uj – ui> aij + vi c - Fij c (1) … retain Fji = 1 – Fij (3) … RELAX Fij = 0 or 1 (2) … reduces to Fij = Fji = 1 (2') … so only constraint 1, with fixed F, remains. • Result: relaxation is an LP in uiand c • use Network Simplex • very fast solution
tree arcs ui(c) uj(c) root i j aij + v'ij c Network Simplex for min c, given F • Extreme point = Spanning tree solution • Longest Path tree determines ui’s as function of c • Each non-tree arc has surplusij = [uj(c) – ui (c)] – [aij + v'ij c] > 0 • c is lowered until, for one arc i-j, surplus = 0 • “Pivot arc” is the one with smallest critical ratio • Creates critical (zero-length) circuit
i j enter tree Network Simplex for min c, given F • Improvement step • Pivot arc enters tree, creating circuit • If it’s a directed circuit, STOP: optimum reached • Circuit arc co-incident to end of pivot arc leaves tree • Lower c to find next extreme point tree arcs exit tree root
Results So Far … • Virtually immediate solution for • “typical” test problem • Test problem in the literature • Awaiting test on “large” problem • Practical implications • Better fixed-cycle timing plans for complex intersections • Possible guidance into optimal sequence for actuated signals