Download
1 / 20
200 likes | 279 Views
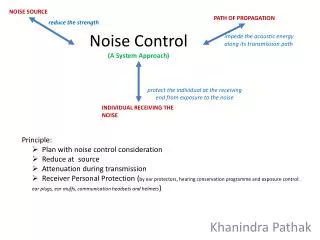
A Control Theory Approach to Self-Stabilizing in Large Distributed System. Student: Fang Hui Supervisor: Teo Yong Meng. Outline. Objective Measurement model Dynamical analysis Algorithm based on parameters Conclusion. Objective.

E N D
A Control Theory Approach to Self-Stabilizing in Large Distributed System Student: Fang Hui Supervisor: Teo Yong Meng sma5510-research methodology
Outline • Objective • Measurement model • Dynamical analysis • Algorithm based on parameters • Conclusion sma5510-research methodology
Objective • Find a way to describe the distributed system stability, and how to measure stability • Analyze the stability bound and finite convergence. sma5510-research methodology
Stability of Distributed System • The conception of self-stabilizing distributed computation was first proposed and explored by Dijkstra in 1974. • A distributed system is self-stabilizing if, • when started from an arbitrary initial state, it is guaranteed to reach a legitimate state. • Once in a legal state, the system does not switch to an illegal state in the absence of failures. sma5510-research methodology
Assumptions • Node can only communicate with neighbors whose pointer contained in its routing table • The links and node both may fail and recover during normal operation • The recovery should be without global intervention, but system will consider the stability in global state sense • Each node will keep some extent stability sma5510-research methodology
Measurement • Global stability is accumulated by each node’s stability. • The node stability is derived from its connectivity knowledge. sma5510-research methodology
Measurement (contd) • Divides the system stability into two types: • vertex stability (considering node failure/leave) , • edge stability (considering routing information) • G= (V, E), where | V | = n is network size • Stability distribution matrix: (D : link, w :node) sma5510-research methodology
Node & Global Stability The value of node-i stability Global stability sma5510-research methodology
Stability examples sma5510-research methodology
Model of Dynamical System • Consider routing inconsistency • An incoming message updates or adds new routing entries (new pointer to other node). This can also be caused by node’s periodically maintanence messages besides query messages. The extra message will consume bandwidth to some extent. • The node flushes the outdated entries in its routing table, in terms of out-going message timeout or other possible way. sma5510-research methodology
Two parameters (p,q) • p: model the factor contributing to improving stability. • q: model the factor contributing to decreasing stability. sma5510-research methodology
Profile of node stability tendency • Max: p/(p+q) Node stability sma5510-research methodology
When (p,q) vary • Now we consider the p and q the functions of abstract time t. where p(t), q(t) in [0,1] sma5510-research methodology
Proved Property 2 sma5510-research methodology
(p,q)-feedback • Based on above, design a feed-back system and algorithm by dynamically adjusting factor p(t) and q(t) in each step. Node stability can be maintained in certain level efficiently. sma5510-research methodology
Algorithm 1:achieve node stability x* in finite time sma5510-research methodology
Algorithm 2: achieve global stability in finite time sma5510-research methodology
The advantage of algorithm • No explicit node coordination after global stability requirement sent out. • Termination-detection unnecessary due to finite time. sma5510-research methodology
Conclusion • Analyze the node behavior of distributed system and give a practical evaluation on the global stability, local stability and expected convergence time. • Sort out the parameters which impact the stability dynamically, by disseminating the global stability requirement and each node reach/maintain local stability in finite time. sma5510-research methodology
Open issues • Introduce more advanced parameters to describe the global stability of system in control theory perspective. • A predefined threshold value of stability may not enough. More accuracy on the global stability also depends on the network topology, or stability distribution (specified in previous section). sma5510-research methodology