Download
1 / 28
280 likes | 292 Views
Learn about design structure matrix (DSM) and its application in predicting and controlling the convergence of iteration work on tasks. Explore the use of interval DSM for more flexible task estimation in engineering design and development.

E N D
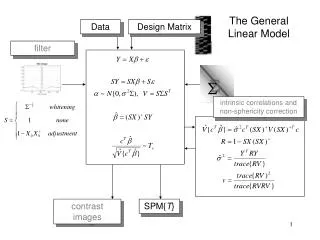
Interval Matrix Models of Design Iteration Ivan Petković University of Niš, Serbia
Introduction • Engineering design & development of new products (industrial products, hardware, software, technical innovations) often contain a very complex set of relationships among many coupled tasks • Engineering products consist of many interdependent parts • Identifying, controlling and redesigning tasks in a process or parts in a complex structure using design structure matrix (DSM) in an iteration process
DSM - Predicting and controlling slow and rapid convergence of iteration work on tasks. • Proposed interval DSM – more flexible quantitative estimation of tasks • Design iteration – interaction among design activities
Large projects and complex processes – dependency between smaller parts • Software – complex set of relationships between assemblies (DLL) • Process (e.g. Software development) – many smaller interdependent tasks
Spiral lifecycle model • Iterations in software development - Spiral lifecycle model • Iterative software development methodologies: • Rapid Application Development (RAD) • Spiral Development (good for large, expensive and complicated projects) • Extreme Programming
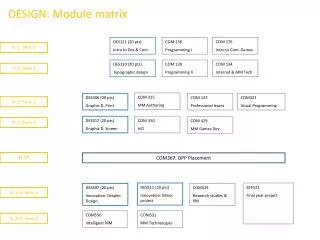
Design Structure Matrix • In reality, dependences are more complex, with loopbacks • DSM (Design Structure Matrix) displays all dependences between tasks • Each cell aijpresents strength of dependence of task i to the task j, given in percents • Rows represent required input (dependency on other tasks) • Columns represent generated output
Design mode • Submatrix of DSM cosisted of tasks complex enough and mutually related so that it takes an iterative process to finish them.
DSM Partitioning Rearranging tasks to create optimal design mode
é ù t a a L 1 12 1 n ê ú a t a L ê ú 21 2 2 n = = + W T A , ê ú M ê ú a a t L ë û 1 2 n n n Work transformation matrix • T - diagonal matrix of times required for each task to be completed, • A - design structure matrix
WTM assumptions • Fully parallel iteration - all tasks are performed in every step • DSM is nonnegative and irreducible • Rework is done as a function of work in the previous iterative step. • The work transformation parameters do not vary with time.
Work vector • Work vector uk is n-dimensional vector where n is the number of coupled design tasks which have to be carried out. • Each element of this vector contains the quantity of work to be completed on every task after the k-th iteration. uk=Auk-1=Aku0
æ ö m m m å å å = = = ç ÷ k k u u A u A u k 0 0 è ø = = = k 0 k 0 k 0 Total work vector • Total work vector, u
Ranking the tasks • According to the Peron-Frobenius theorem there is exactly one positive eigenvalue largest in magnitude ( equal to the spectral radius of A) and the corresponding eigenvector with positive elements.
Ranking the tasks • Largest eigenvalue, λm, is less than 1 and dominantly influences the convergence speed of the sequence {Ak}, and, consequently, the sequence of work vectors uk • Higher the entries of the corresponding positive eigenvector, vm, the greater influence of that entry (and the corresponding task) is to that mode.
Interval DSM • Greater flexibility in task estimation • Using intervals instead of real numbers [0.09,0.11] is more flexible than 0.1 (10%) • Interval DSM - A = (ij), • ij - real intervals • A is called irreducible if the real matrix |A| is irreducible.
å ¥ k A = 0 k ( ) å å m m = = k k u A u A u . 0 0 = = k 0 k 0 å å ¥ m - Ì = - k k 1 A A ( I A ) = = k 0 k 0 Interval DSM • Initial work vector u0 has all entries =1 • A0= I • is convergent if ρ(|A|)<1
) ( å m - Ì - k 1 = u A u ( I A ) u . 0 0 = k 0 Interval DSM • Total work vector • Ranking tasks is performed similarly as in case of point DSM.
[ ] [ ] [ ] é ù 0 0 . 24 , 0 . 26 0 . 29 , 0 . 31 0 . 09 , 0 . 11 ê ú [ ] [ ] 0 . 19 , 0 . 21 0 0 0 . 24 , 0 . 26 ê ú [ ] [ ] ê ú 0 0 . 19 , 0 . 21 0 0 . 29 , 0 . 31 ê ú [ ] [ ] [ ] 0 . 29 , 0 . 31 0 . 09 , 0 . 11 0 . 19 , 0 . 21 0 ë û Example of interval DSM • A=
Dominant eigenvalue Corresponding eigenvector
Dominant eigenvalue • |λ1|=0.581...<1, so I+A+ A2+A3+… is convergent [0.54738574910929,0.54738574910930] [0.40530246418811,0.48320004678584] [0.41236410795740,0.49979479009649] [0.49655775290886,0.58972250530368] • (I-A)-1 = First and fourth tasks are dominant [1.15927,1.21872] [0.37837,0.45720] [0.39304,0.46093] [0.30706,0.39582] [0.31389,0.37716] [1.13391,1.18627] [0.15500,0.20366] [0.34369,0.41305] [0.17301,0.22375] [0.29097,0.35673] [1.12699,1.17019] [0.41063,0.48012] [0.39557,0.46628] [0.26509,0.34713] [0.34046,0.41103] [1.19573,1.26896]
[ ] [ ] [ ] [ ] é ù é ù é ù 0 . 62 , 0 . 68 0 . 294 , 0 . 353 é 0 . 1606 , 0 . 2117 ù 0 . 0853 , 0 . 1226 ê ú ê ú ê ú ê ú [ ] [ ] [ ] [ ] 0 . 0677 , 0 . 0977 0 . 1301 , 0 . 1707 0 . 43 , 0 . 47 0 . 255 , 0 . 307 ê ú ê ú ê ú ê ú [ ] [ ] [ ] [ ] ê ú ê ú ê ú ê ú 0 . 0697 , 0 . 0993 0 . 1382 , 0 . 1796 0 . 48 , 0 . 52 0 . 247 , 0 . 295 ê ú ê ú ê ú ê ú [ ] [ ] [ ] [ ] 0 . 0845 , 0 . 1221 0 . 1550 , 0 . 2048 0 . 310 , 0 . 372 0 . 57 , 0 . 63 ë û ë û ë û ë û Work vectors through four iterations • Work done in the second and third task is less than the work in the first and fourth task U1 U2 U3 U4
By ranking entries of the corresponding eigenvector, we rank the contributions of the design tasks
Conclusion • DSM matrices are of growing interest nowdays. • They are inevitable tool for the analysis of many scientific problems, not only in project design but also in the analysis of GPS signals, image recognition, or, whenever there is a mutual influence between tasks/participants. • In all these problems, the analysis is reduced to the investigation of the corresponding DSM and its eigenvalues, whose ranking defines the ranking of tasks within a project. Higher the absolute eigenvalue, the slower convergence of the iteration of design process. • Introducing interval DSM gives more freedom in task estimation