Download
1 / 13
130 likes | 226 Views
Effects of model error on ensemble forecast using the EnKF. Hiroshi Koyama 1 and Masahiro Watanabe 2 1 : Center for Climate System Research, University of Tokyo / Environmental Science, Hokkaido University 2 : Center for Climate System Research, University of Tokyo. UAW 2008, 1 July 2008.

E N D
Effects of model error on ensemble forecast using the EnKF Hiroshi Koyama1 and Masahiro Watanabe21 : Center for Climate System Research, University of Tokyo / Environmental Science, Hokkaido University2 : Center for Climate System Research, University of Tokyo UAW 2008,1 July 2008
Introduction Model deficiencies • The ensemble forecast error of numerical weather prediction is caused not only by inaccurate initial conditions but also by model deficiencies. • The model deficiencies can have an impact on the forecast error in the one-month forecast. Model ensemble • The method to improve measures against the model deficiencies • There is little method with theoretical proof for effectiveness
Purpose and Method Purpose • The feature of the prediction scores in the one-month ensemble forecast with model error • The effectiveness of model ensemble methods Method • The prediction scores on imperfect model with model errors are compared to those on perfect model • Initial ensemble members are generated by EnKF • Introduce model ensembles • Models : 1. Lorenz’96 model (low-order) 2. AGCM (high-order)
Ensemble Kalman Filter The EnKF ( Ensemble Kalman Filter; Evensen 1994 ) is the technique for uniting ensemble forecast and data assimilation. Observation True + + Ensemble forecast Ensemble forecast Initial perturbations for next forecast Analysis (Data assimilation) By repeated the cycle of ensemble forecast and data assimilation, the best analysis and initial perturbation will be obtained.
Lorenz96-EnKF : Model Loenz’96 model (Lorenz 1996) Periodic boundary x : large-scale, y : small-scale y fluctuate more rapidly than x x : forecast variables, directly computable y : sub-grid scale processes, unresolved Time evolution of x and y AGCM x y M = 8, N = 4 F=10, h=1, c=10, b = 10 (Smith2000, Orrell2002)
Lorenz96-EnKF : Model Perfect model without model error Imperfect model with model error The term of y is approximated by the linear regression of x. y is not calculated. (Parameterization of y) y term in the equation of x 3 2 1 0 -1 -2 -3 ( Smith2000,Orrel2003,Wilks2005 ) Perfect model Imperfect model Good as primary approximation -10 -5 0 5 10 15
Lorenz96-EnKF : Experimental design EnKF • Serial EnSRF (Whitaker and Hamill 2002) • Number of initial members :50 • S.D. of observation error : x = 0.2, y = 0.02 • Assimilated interval : 0.05 (≒ 6 hours on real atmosphere) • Online estimation of covariance inflation (Miyoshi and Kalnay 2005) • Localization of covariance matrix (Gaspari and Cohn 1999) True and Observation • True : Control run in perfect model • Observation : True + Gaussian random noise
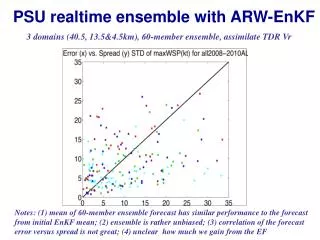
Lorenz96-EnKF : Result Perfect model RMSE (Climatology) • Predictability limit is about 20 days. • Spread is almost equal to RMSE RMSE(Control run) Spread RMSE Forecast day Imperfect model RMSE (Climatology) • Predictability limit is about 15 days. • Spread is considerably smaller than RMSE RMSE(Control run) Spread RMSE Forecast day Model error = (RMSE in imperfect model)-(RMSE in perfect model) imperfect Model error is the maximum at about day 8 forecast perfect Forecast day
Lorenz96-EnKF : Model ensembles Model ensembles 1. Stochastic physics method (STC) (Buizza et al.1999) • Random coefficient is multiplied by parameterization term • This coefficient is different in every member and every step : parameterization term k : k th member wk:amplitude : Gaussian noise 2. Multi parameter method (MLT) • Multiple parameter set are created by adding parameter perturbations to control parameters • Initial ensemble forecast run independently for each parameter set • (Total member) = (Initial member) x (Parameter member) Parameter set :
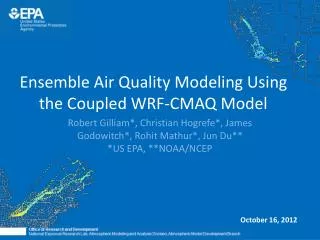
Lorenz96-EnKF : Result NON : without model ensemble MLT : multi-parameter STC : stochastic physics Model error NON • By introducing model ensemble, model error is reduced after day 7 forecast. MLT STC Forecast day Spread / RMSE MLT • By introducing model ensemble, Spread / RMSE is close to 1. STC NON Forecast day Both model ensemble methods are effective on reducing model error and optimizing spread .
AGCM-EnKF : Experimental design AGCM • CCSR/NIES/FRCGC AGCM 5.7b • T21L11 global spectral model • Forecast variables :u, v, t, ps, q EnKF The same package used in the Lorenz 96 model • Ensemble members : 32 • Assimilated interval : 6 hours • Simultaneous estimation of covariance inflation and observation errors (Li et al.) Type of experiment
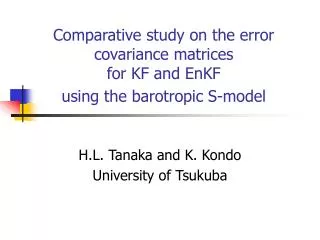
AGCM-EnKF : Result Perfect assimilation • RMSE is smaller than S.D. of observation error. • Spread is equal to RMSE • Stability for 3 months T500 RMSE Spread Date forecast • Predictability limit is about 20 days. • Similar to the result of Lorenz’96 model RMSE Spread Z500 Forecast day • Assimilated spread is considerably smaller than RMSE • Forecast spread is also so geography ? Land surface variables ? Imperfect assimilation forecast RMSE RMSE T500 Spread T500 Spread Date Forecast day
Conclusion and Perspectives Conclusion • By using Lorez’96 model with model error, the one-month forecasts are started from initial perturbation created by EnKF. • Model error is the maximum at about day 8 forecast. • Model ensemble methods are effective on reducing model error and optimizing spread Perspectives • To continue the experiment using AGCM. • To find systematic relationship between model deficiency and model error. • To find and evaluate more effective model ensemble methods