Download
1 / 18
180 likes | 211 Views
Explore the representation of model error in ensemble data assimilation focusing on mesoscale aspects and surface observations. Compare different model-error treatments and their impact on forecast accuracy. Discuss the use of multi-physics and stochastic backscatter approaches. The study evaluates various schemes through tests on a CONUS domain, providing insights into handling model errors effectively in the assimilation process.

E N D
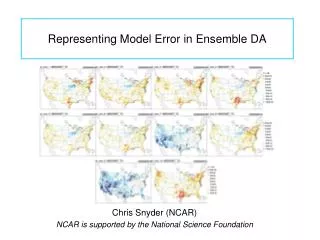
Representing Model Error in Ensemble DA Chris Snyder (NCAR) NCAR is supported by the National Science Foundation
Representing Model Error in Ensemble DA Results from: Soyoung Ha (NCAR) Judith Berner (NCAR) Josh Hacker (NPS)
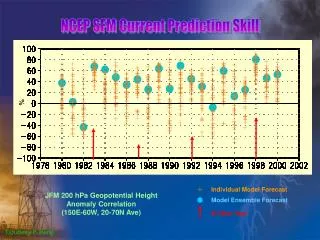
Introduction • Parameterized physical processes crucial at both meso- and convective scales • Model errors relatively more important than at synoptic and global scales • Meso- and convective-scale motions incompletely observed • E.g., lots of v obs but few of T at convective scale • DA scheme must use info from model dynamics to infer unobserved variables • DA scheme should therefore account for forecast-model errors
Introduction (cont.) • For ens. DA, natural to represent model error during forecast step • Multi-physics: Members uses distinct suites of physical parameterizations • Multi-parameter: Single physics suite, but parameters within parameterizations vary among members • Stochastic backscatter: Include noise in tendencies at each time step (iid!) • Can also represent in analysis step • Additive noise that depends on observations (Dowell and Wicker 2009) • Inflation of various flavors: “inflate” deviations of ensemble members about mean before assimilation
Introduction (cont.) • Here, focus on mesoscale aspects, esp. surface observations
Comparison of Model-Error Treatments in EF • Tests on CONUS domain • WRF/ARW, 45 km • Forecasts from GFS ensemble ICs every 3 days over 3 winter months • Evaluation against obs • Three schemes • Multi-physics. 10 distinct parameterization suites • Stochastic backscatter. Noise has spatially uniform variance • Limited multi-physics, multi-parameter (LMP2). 3 parameterization suites plus perturbations to one parameter in each of microphys, Cu, PBL, SW rad.
Comparison of Model-Error Treatments in EF • Stochastic backscatter better than multiphysics at 700 hPa; multiphysics better than backscatter near surface Difference in CRPS, 700 hPa T Difference in CRPS, 2-m T Courtesy Josh Hacker. See Hacker et al (2011), Berner et al (2011)
WRF/DART • Data Assimilation Research Testbed (DART) • Provides EnKF algorithm(s) • General framework, used for several other models • Parallelizes efficiently to 100’s of processors • See http://www.image.ucar.edu/DAReS/DART/ • WRF/ARW is forecast model • Suite of observation operators • Includes Doppler radar and various GPS; no radiances • Capable of assimilation on multiple, nested domains simultaneously
Assimilation of Surface Observations • Experimental design: • CONUS domain, 45-15 km nested configuration • 3-hourly analyses, with continuous cycling for June 2008 • Assimilate conventional obs and METAR observations • Evaluate against (independent) mesonet observations • Also tested “multiphysics” configuration • 10 different suites of physical parameterizations • EnKF details • 50 members • ~800-km localization • Adaptive inflation
Assimilation of Surface Observations (cont.) • Accounting for model error improves analyses and 3-h forecasts (NOT assimilated)
Adaptive Inflation • If forecast spread is too small, “inflate” ensemble deviations: • xi = (xi - E(x)) + E(x), • where dim() = dim(x), i.e. inflation for each state variable, spatially and temporally varying. (Anderson 2009) • Estimate with a Bayesian update: • p( | y) = p(y | ) p(). • Requires assumption that cor() = cor(x). • Accounts for numerous sources of uncertainties
Control physics Multi-physics Assimilation of Surface Observations (cont.) • Compensation between different model-error treatments • Need less inflation when using multi-physics ensemble
Which Approach? • Multi-physics and backscatter perform comparably for surface obs • Multiphysics: • Represents “structural” model error and differences among members are often differences in bias/climate • System is demanding to maintain as model and parameterizations evolve • V. v. demanding to improve all 10 suites • What to do in ensemble DA when members have different state variables? • Backscatter: • Represents random variations in grid-scale effects from sub-grid variability • Single model configuration, so easy to maintain and feasible to improve
Which Approach? • Multi-physics and backscatter perform comparably for surface obs • Multiphysics: • Represents “structural” model error and differences among members are often differences in bias/climate • System is demanding to maintain as model and parameterizations evolve • V. v. demanding to improve all 10 suites • What to do in ensemble DA when members have different state variables? • Backscatter: • Represents random variations in grid-scale effects from sub-grid variability • Single model configuration, so easy to maintain and feasible to improve • We favor backscatter at present.
Issues at the Convective Scale • Environment may be wrong because of model error/bias or because of random IC error at larger scale • Easy to conflate model error and larger-scale IC error • Crucial to consider extended periods or many cases • Where there is convective instability, expect error growth rates to increase rapidly as scale decreases • Backscatter may be especially effective • Backscatter for advected substances?
AFWA MEPS Ensemble Configurations AFWA’s Mesoscale Ensemble Prediction System (MEPS)
LMP2 Details • Perturbation magnitude chosen s.t. differences in forecast comparable to those • produced in previous perturbed-parameter experiments